[UMEHOSHI ITA] 婎斅偺僥僗僩梡僾儘僌儔儉巇條
[UMEHOSHI ITA]偺惂屼偱巊偭偰偄傞IC乽PIC32MX270F256B-I/SO乿偺僼儔僢僔儏儊儌儕偵偼丄僥僗僩梡僾儘僌儔儉偑彂偒崬傑傟偄偰偄傑偡丅
埲崀偱偼丄偙偺僾儘僌儔儉傪乽僥僗僩丒僂儊丒僼儔僢僔儏乿偲屇傇偙偲偵偟偰夝愢偟傑偡丅
乽僥僗僩丒僂儊丒僼儔僢僔儏乿偺婲摦偼師偺庬椶偑偁傝傑偡丅
| 憖嶌 | 奣梫 |
|---|
| 乽micro B乿偺儊僗傪嵎偟崬傫偱丄5倴揹尮傪嫙媼偡傞偙偲偱僷儚乕僆儞偺忬懺偵側傝傑偡丅 | 僷儚乕僆儞帪偺弶婜壔乮D1 LED偑揰摂乯 |
| 僷儚乕僆儞偺忬懺偱丄SW1偲SW2傪墴偟偰丄SW1傪棧偟偰偐傜2昩埲撪偱SW2傪棧偡 | 僷儚乕僆儞帪偺弶婜壔乮D1 LED偑揰摂乯 |
僷儚乕僆儞偺忬懺偱丄SW1偩偗傪墴偟偰丄棧偡
(SW1偑儕僙僢僩梡偺僗僀僢僠偱偡偑丄偡傋偰弶婜壔偡傞傕偺偱偼偁傝傑偣傫丅)
| 儕僙僢僩帪偺弶婜壔乮D1 LED偑徚摂乯 |
僷儚乕僆儞帪偵SW2傪墴偟偰丄3昩埲忋4昩枹枮屻偵SW2傪棧偡.丂傑偨偼丄
僷儚乕僆儞偺忬懺偱丄SW1偲SW2傪墴偟偰丄SW1傪棧偟偰偐傜3昩埲忋4昩枹枮屻偵SW2傪棧偡
乮儕僙僢僩偺SW1偲SW2傪墴偟丄SW1傪棧偟偰LED1偑徚摂偵曄傢傞傑偱SW2傪墴偟懕偗傑偡丅乯
|
僗儖乕儌乕僪傊偺弶婜壔乮D1 LED偑徚摂乯 |
僷儚乕僆儞帪偵SW2傪墴偟偰丄4昩埲忋屻偵SW2傪棧偡.丂傑偨偼丄
僷儚乕僆儞偺忬懺偱丄SW1偲SW2傪墴偟偰丄SW1傪棧偟偰偐傜4昩埲忋屻偵SW2傪棧偡
乮SW1偲SW2傪墴偟丄SW1傪棧偟偰LED1偑徚摂偐傜揰摂偵曄傢傞傑偱SW2傪墴偟懕偗傑偡丅乯
|
UART1僐儅儞僪儌乕僪傊偺弶婜壔
乮D1 LED偑揰摂乯 |
仠 僗儖乕儌乕僪偲偼USB偵憲偭偨忣曬偑UART偵憲傜傟丄媡偵UART偵憲偭偨忣曬偼USB偵憲傜傟傞忬懺偱偡丅
丂丂乮僼儘乕惂屼偱側偔丄曅曽岦儌乕僪偱捠怣偟傑偡丅乯
仠 UART1僐儅儞僪儌乕僪偼丄UART偱壓婰偱帵偡乽UME愱梡Hex僐儅儞僪乿傪庴偗晅偗傞忬懺偱偡丅
丂乮UART1僐儅儞僪儌乕僪偱偼丄USB偱乽UME愱梡Hex僐儅儞僪乿傪庴偗晅偗傞偙偲傕壜擻偱偡丅
丂丂UART1僐儅儞僪儌乕僪偱UART偵憲傟傞乽UME愱梡Hex僐儅儞僪乿偼丄'S'偲'R'偲'G'偐傜巒傑傞柦椷偩偗偱偡丅
丂丂偦偟偰丄墳摎暥帤楍偼 USB偲UART偺椉曽偵弌椡偟傑偡丅
丂丂傑偨丄屻弎偺_send_uart1(uint8_t)偱1byte偺僨乕僞傪丄UART1偵愙懕偟偰偄傞憡庤偵憲怣偱偒傑偡丅乮捠忢儌乕僪偱傕壜擻乯
丂丂側偍僨僼僅儖僩偱丄UART1偲偺捠怣偼僼儘乕惂屼傪偟偰偄傑偡丅乯
仠 捠忢儌乕僪偼丄僗儖乕儌乕僪偱傕UART1僐儅儞僪儌乕僪偱傕側偄儌乕僪偱偡丅
丂偙傟偼丄僷儚乕僆儞偺忬懺傗儕僙僢僩偺忬懺偱婲摦帪偵SW2(敀)偺憖嶌傪偟側偄忬懺偱丄USB偱乽UME愱梡Hex僐儅儞僪乿傪庴偗晅偗傑偡丅
丂偙偺忬懺偱UART1偺愙懕乮ESP32傗Bluetooth傪愙懕偟偨忬懺乯傪偟偰偄傟偽丄UMEHOSHI ITA偺UART1偱庴偗庢偭偨僨乕僞偼丄USB偐傜弌椡偝傟傑偡丅
乮偙偺僨僼僅儖僩愝掕偱偼丄丂UART1偺捠怣偑僼儘乕惂屼柍偟偺忬懺偱偡丅乯
乽僥僗僩丒僂儊丒僼儔僢僔儏乿傪棙梡偟偨儐乕僓乕梡偺僾儘僌儔儉傪
乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿偲屇傇偙偲偵偟傑偡丅
偙偺乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿偱棙梡偡傞RAM儊儌儕偼師偺傛偆偵戝偒偔俀偮椞堟偵掕媊偝傟丄
棙梡偱偒傞椞堟偼寛傔傜傟偰偄傑偡丅
- 乽_HANDLES乿(command.h偱掕媊)偺億僀儞僞傪愭摢偡傞椞堟
- 棙梡幰偺僾儘僌儔儉椞堟 (偙偙偵僾儘僌儔儉傪揮憲偟偰幚峴偝偣傑偡丅)
偙偺俀偮偺椞堟偺巊偄曽傪埲壓偱夝愢偟偰偄傑偡丅
乽_HANDLES乿(command.h偱掕媊)偺億僀儞僞傪愭摢偡傞椞堟
偙偺椞堟偼丄妱傝崬傒儖乕僠儞娭楢傗僔僗僥儉忣曬偲偙傟偵娭楢偡傞娭悢側偳傪婰壇偡傞僥乕僽儖偺椞堟偱丄師傛偆偵掕媊偝傟偰偄傑偡丅
void (*handlers_table[(0x1000>>2)-4])(void) __attribute__ (( persistent, address(_PTR_HANDLERS) ));
// _PTR_HANDLERS偼0x80004000(傑偨偼0xA0004000)偱丄偙偺埵抲偐傜(0x1000>>2)-4=1020儚乕僪偺椞堟
偙偺婰壇堟偼丄儊僀儞偺儖乕僾偑巒傑傞慜偵強掕偺撪梕偵愝掕偝傟傑偡丅(init_main偺init_handle_area娭悢)
偙偺椞堟偺堦晹偼丄SW1偺儕僙僢僩憖嶌偱曄峏偝傟側偄晹暘偑偁傝傑偡丅
Timer4偵娭偡傞嬶懱揑側椺偲偟偰愢柧偟傑偡丅
僷儚乕ON帪偺弶婜偱_HANDLES[_IDX_INIT_TIMER_4_5]偵僞僀儅妱傝崬傒偺弶婜壔娭悢偑婰壇偝傟丄0.05m昩偺僀儞僞乕僶儖妱傝崬傒偺弶婜壔偑側偝傟偰偄傑偡丅
偦偟偰丄偙偺僞僀儅乕妱傝崬傒娭悢偐傜_HANDLES[_IDX_TIMER_4_FUNC]偵婰壇偝傟傞娭悢偑傛傃偩偝傟傞傛偆偵側偭偰偄傑偡丅
偦偟偰_HANDLES[_IDX_TIMER_4_FUNC]偵偼僷儚乕ON帪偺弶婜愝掕偱丄1昩偛偲偵LED2傪揰柵偡傞娭悢偑婰壇偝傟偰偄傑偡丅
傛偭偰丄棙梡幰偼乽T4CONbits.ON = 1;// timer4偺巊梡偺僆儞乿偲
乽IEC0bits.T4IE = 1;// Timer4 Enable乮妱崬傒嫋壜乯乿傪
幚峴偡傞偩偗偱LED2偺揰柵偑壜擻偵側傝傑偡丅
偦偟偰丄_HANDLES[_IDX_TIMER_4_FUNC]偺撪梕傪帺恎偑嶌偭偨娭悢偵曄峏偡傞偙偲偱
婓朷偺張棟傪0.05m昩偛偲偵幚峴偱偒傞傛偆偵側傝傑偡丅
乮偙偺_HANDLES[_IDX_TIMER_4_FUNC]偺婰壇撪梕偲乽屻弎偺僾儘僌儔儉椞堟乿偼 儕僙僢僩偺弶婜壔傪偟側偄偺偱丄
儕僙僢僩屻傕摦嶌偱偒傞傛偆偵側巊偄曽偑壜擻偱偡丅乯
偙偺巇慻傒偱僨僼僅儖僩偺弶婜壔娭悢傗丄奺庬妱傝崬傒娭悢傪棙梡幰偑嶌偭偨娭悢偵搊榐偟捈偡偙偲偱戝偒側僔僗僥儉曄峏偑壜擻偵側偭偰偄傑偡丅
偙偺曄峏傪敽偆僾儘僌儔儈儞僌偼彮偟擄堈搙偑崅偄偺偱偡偑丄揹尮傪愗偭偰偟傑偊偽傕偲偵栠傞偺偱帋偟偰棟夝偡傞偺偑堦斣偱偡丅
徻嵶偼丄偙偪傜偵傑偲傔傑偟偨丅
棙梡幰偺僾儘僌儔儉椞堟
棙梡幰偑偙偺僔僗僥儉傪棙梡偟偰僾儘僌儔儉偡傞応崌丄師偺椞堟傪巊偄傑偡丅偙偺椞堟偼SW1偺儕僙僢僩憖嶌偱曄峏偝傟傑偣傫丅
(儕僙僢僩慜偵婰壇偟偨撪梕偱摦嶌傪懕偗傞僾儘僌儔儉偑壜擻偱偡丅)
char ram_area1[0x3000] __attribute__ (( persistent, address(_PTR_RAM_AREA1) ));// PROGRAM AREA (_PTR_RAM_AREA1 偑 0xA0005000 )
char ram_area2[0x1000] __attribute__ (( persistent, address(_PTR_RAM_AREA2) ));// DATA AREA (_PTR_RAM_AREA2 偑 0xA0008000 )
char ram_area3[0x0F00] __attribute__ (( persistent, address(_PTR_RAM_AREA3) ));// USER INDEX AREA(_PTR_RAM_AREA3 偑 0xA0009000 )
偙傟傜偺婰壇堟偼偦傟偧傟師偺梡搑偱巊偆偙偲傪憐掕偟偰偄傑偡丅
| ram_area1偺乽0x3000 byte乿 | 僾儘僌儔儉梡乮12288byte乯 | 愭摢傾僪儗僗:0x80005000(0xA0005000) |
| ram_area2偺乽0x1000 byte乿 | 曄悢側偳偺僨乕僞梡乮4096byte乯 | 愭摢傾僪儗僗:0x80008000(0xA0008000) |
| ram_area3偺乽0x0F00 byte乿 | 愨懳傾僪儗僗巜掕偱棙梡偡傞婰壇堟(3840byte) | 愭摢傾僪儗僗:0x80009000(0xA0009000) |
偙偺婰壇堟偼丄USB乮CDC乯傪夘偟偨捠怣偱丄RAM儊儌儕偺彂偒崬傒丄巜掕傾僪儗僗偺幚峴丄RAM儊儌儕偺撪梕庢摼
側偳偺僐儅儞僪憖嶌偑偱偒傑偡丅
偙偺彂偒崬傒柦椷偱僾儘僌儔儉傪揮憲偟丄愨懳傾僪儗僗巜掕偺幚峴柦椷偱僾儘僌儔儉傪婲摦偡傞巇慻傒偱偡丅
[UMEHOSHI ITA]偺弶婜壔偼2抜奒偁傝丄僷儚乕僆儞ON帪偺弶婜壔偲偄偆傕偺偑偁傝丄
僷儚乕僆儞ON帪偼偙偺弶婜壔偺屻偵丄儕僙僢僩偵傛傞弶婜壔偑峴傢傟傑偡丅
儕僙僢僩偵傛傝弶婜壔偼丄僗僀僢僠乮SW1乯傪墴偡偙偲峴傢傟傑偡丅
偙偺僗僀僢僠乮SW1乯傪墴偡儕僙僢僩憖嶌偼丄乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿撪梕傪弶婜壔偟傑偣傫丅
傛偭偰丄僗僀僢僠乮SW1乯儕僙僢僩憖嶌偱RAM偵婰壇偟偨僾儘僌儔儉傪嵞婲摦偝偣傞寍摉偑偱偒傑偡丅
側偍丄僷儚乕僆儞ON帪偺弶婜壔偼丄僨僼僅儖僩偺巊偄偄曽傪偟偰偄傞応崌丄師偺憖嶌偱摦偐偡偙偲偑偱偒傑偡丅
儕僙僢僩僗僀僢僠乮SW1乯偲 SW2傪摨帪偵墴偟偰丄偦偺屻偱SW1傪棧偟偰偐傜 SW2傪乮1昩枹枮偱乯棧偟傑偡丅
側偍丄僨僼僅儖僩偺僾儘僌儔儉偱偼丄僷儚乕僆儞ON帪偺弶婜壔偑峴傢傟傞偲LED1偑揰摂偟傑偡丅
儕僙僢僩僗僀僢僠乮SW1乯偺憖嶌偩偗偺応崌偼丄LED1偑揰摂偟傑偣傫丅傛偭偰僷儚乕僆儞ON偺捈屻偐敾掕偱偒傑偡丅
側偍丄SW1偲 SW2傪摨帪偵墴偟偰丄偦偺屻偱SW1傪棧偟偰偐傜 SW2傪乮1昩枹枮偱乯棧偟傑偡丅
( 僨僼僅儖僩偺僐傾僞僀儅偵搊榐偝傟傞 core_timer_sub_1娭悢 偱張棟偟偰偄傑偡丅)
憲庴怣偼婎杮揑偵16恑傪昞偡暥帤楍偱丄師偺傛偆偵寛傔傜傟偰偄傑偡丅堦偮偺僐儅儞僪偼[CRLF]偺夵峴偺憲怣偱廔寢偟傑偡丅
偮傑傝丄1峴偑1僐儅儞僪偲側傝傑偡丅偦偟偰巇條偵崌傢側偄暥帤楍偺暥帤楍偺庴怣偼柍帇偝傟傑偡丅
偙傟傪婰壇偟偨僼傽僀儖傪乽UME愱梡Hex僼傽僀儖乿傪屇傇偙偲偵偟偰偄傑偡丅
偙偺UME愱梡Hex僼傽僀儖偼丄乽umehoshiEdit乿偲偄偆奐敪僣乕儖傪巊偄傑偡丅
乽umehoshiEdit乿偺奐敪娐嫬偼丄
偙偪傜傪嶲峫偵梡堄偟偰偔偩偝偄丅
乽UME愱梡Hex僐儅儞僪乿
| 僨乕僞彂偒崬傒柦椷 | 'S' 暥帤楍偺巇條 |
|---|
| 僾儘僌儔儉丒僨乕僞側偳偺僐乕僪側偳傪揮憲偡傞 |
['S'儗僐乕僪庬暿暥帤] [2暥帤偺屄悢僨乕僞] [傾僪儗僗16恑8暥帤] [2暥帤儗僐乕僪庬暿] 亀[16恑楢懕2暥帤]偑(僨乕僞挿)暘暲傇乿亁 [2暥帤僠僃僢僋僒儉] |
| [80008000] 斣抧偵16byte傪僙僢僩偡傞椺 |
S108000800000000102030405060708090A0B0C0D0000E5偺夵峴偱偙偺峔惉偼師偺傛偆偵側傞丅
[S] [10] [80008000] [00] [00] [01] [02] [03] [04] [05] [06] [07] [08] [09] [0A] [0B] [0C] [0D] [00] [00] [E5]
[S]乣 僠僃僢僋僒儉偺[E5]偺庤慜傑偱暥帤僐乕僪偺憤榓偼0x091B偵側傝丄偙傟偵僠僃僢僋僒儉0x0E5偲壛嶼偡傞偲0xA00偵側傝丄1byte偱偼00偵側傞丅
[傾僪儗僗16恑8暥帤] 偺愝掕晹偑丄0x80000000 埲忋偱 0x8000ffff 埲壓丄枖偼 0xa0000000 埲忋偱 0xa000ffff 埲壓偱偁傟偽丄RAM偲偟偰愝掕
偦偟偰丄0x9D020000 埲忋偱 0x9D03FFFC 埲壓帪偼丄ROM偲偟偰彂偒崬傒張棟傪峴偄傑偡丅
|
| 忋婰偺墳摎 |
愝掕偟偨僗僞乕僩傾僪儗僗傪愝掕屻偵弌椡偡傞暥帤楍丅 椺乽SET:80008000乿
乮愝掕偑幐攕偟偨応崌丄愝掕懳徾偑RAM偺応崌偼偙偺墳摎暥帤椺傪弌偟傑偣傫丅ROM偺応崌偼丄僄儔乕暥帤楍傪弌偟傑偡丅乯
|
| 幚峴屇傃弌偟柦椷 | 'R' 暥帤楍偺巇條 |
|---|
| 巜掕傾僪儗僗偺娭悢傪屇傃弌偡 |
['R'儗僐乕僪庬暿暥帤] [00偺2暥帤] [傾僪儗僗16恑8暥帤] [00偺2暥帤] [2暥帤僠僃僢僋僒儉]
|
| [80005000]斣抧偺娭悢傪幚峴 |
R00800050000061偺夵峴偱偙偺峔惉偼師偺傛偆偵側傞丅
[R] [00] [80005000] [00] [61]
|
| 忋婰偺墳摎 |
椺乽START:80005000乿偺儊僢僙乕僕屻偵丄偙偺埵抲偺娭悢傪屇傃弌偟偟傑偡丅
|
| 僨乕僞庢摼柦椷 | 'G' 暥帤楍偺巇條 |
|---|
| 儊儌儕忣曬偺庢摼 |
['G'儗僐乕僪庬暿暥帤] [2暥帤偺屄悢僨乕僞] [傾僪儗僗16恑8暥帤] [00偺2暥帤] [2暥帤偺僠僃僢僋僒儉] |
| [80009000]斣抧偐傜16byte偺儊儌儕撪梕偺庢摼 |
G10800090000067偺夵峴偱偙偺峔惉偼師偺傛偆偵側傞丅
[G] [10] [80009000] [00] [67]
|
| 忋婰偺墳摎 |
偙偺儗僗億儞僗偼丄':'傪愭摢偵偟偨僼僅乕儅僢僩偱墳摎偡傞丅師偺宍幃偱偁傞丅
[丗] [僨乕僞挿偺16恑2暥帤] [傾僪儗僗16恑8暥帤] [00偺2暥帤] [僨乕僞挿偺16恑2暥帤偺楢懕] [2暥帤偺僠僃僢僋僒儉]
椺丂乽:108000900000EE0ABC6EC71A6C232B1CA4A3A13D2CAAFE乿
忋婰偼丄師偺峔惉偱偁傞丅
[:][10][80009000][00][EE][0A][BC][6E][C7][1A][6C][23][2B][1C][A4][A3][A1][3D][2C][AA] [FE]
|
| 亂僄僐乕儌乕僪亃愗傝懼偊柦椷 | |
|---|
| 捈慜偑夵峴偱偁傞帪丄E偲夵峴("\r\n")傪憲傞偲愗傝懼傢傢傝傑偡丅乮僠僃僢僋僒儉晄梫乯 |
忋婰偺墳摎 | 僷儚乕ON偺捈屻偼僄僐乕儌乕僪偑ON偱丄ON偺帪偼USB憲偭偨忣曬偑偦偺傑傑USB偵栠偝傟傑偡丅
ON儌乕僪偺帪偵E偲夵峴("\r\n")傪憲傞偲丄ECHO OFF偑昞帵偝傟偰OFF儌乕僪偵側傝傑偡丅
OFF儌乕僪偺偺帪偵E偲夵峴("\r\n")傪憲傞偲丄ECHO ON偑昞帵偝傟偰ON儌乕僪偵側傝傑偡丅 |
| 亂 堦帪僗儖乕儌乕僪亃愗傝懼偊柦椷 | |
|---|
| 捈慜偑夵峴偱偁傞帪丄T偲夵峴("\r\n")傪憲傞偲亂 堦帪僗儖乕儌乕僪亃偵側傝傑偡丅乮僠僃僢僋僒儉晄梫乯
傑偨捈慜偑夵峴偱偁傞帪丄乽code from through mode to nomal mode 123乿偲夵峴傪憲傞偲丄
亂 堦帪僗儖乕儌乕僪亃偐傜亂捠忢儌乕僪亃偵栠傝傑偡丅 |
忋婰偺墳摎 | 亂 堦帪僗儖乕儌乕僪亃偵側傞偲丄USB偵憲偭偨忣曬偑UART偵憲傜傟丄媡偵UART偵憲偭偨忣曬偼USB偵憲傜傟傞傛偆偵側傝傑偡丅
偙偺忬懺偱偼 UART偵愙懕偟偨僨僶僀僗乮椺偊偽丄U17偵庢傝晅偗偨RN4020丄傑偨偼U19偵庢傝晅偗偨ESP32丄傑偨偼CN11-12偵庢傝晅偗偨RN42側偳乯偲USB傪夘偟偨
捠怣偑壜擻側忬懺偱偡丅
側偍丄偙偺亂 堦帪僗儖乕儌乕僪亃偼亂捠忢儌乕僪亃偵栠傟傑偡偑丄婲摦帪偵3昩埲忋4昩枹枮偺僞僀儈儞僌偱SW2傪墴偟偨帪偵慗堏偡傞僗儖乕儌乕僪偼亂捠忢儌乕僪亃偵栠傞偙偲偑偱偒傑偣傫丅
|
乽umehoshiEdit乿奐敪僣乕儖偱偼丄忋婰偱帵偟偨僐儅儞僪捠怣傪棙梡偟偰僾儘僌儔儈儞僌傪揮憲偟偰偄傑偡丅
偦傟埲奜偵乽Tera Term乿偺傛偆側僞乕儈僫儖僄儈儏儗乕僞傪暿搑偵僀儞僗僩乕儖偟偰妋擣偡傞偙偲傕偱偒傑偡丅
埲壓偱丄乽Tera Term乿傪巊偭偰摦嶌傪妋擣偡傞椺傪帵偟傑偡丅
傑偢USB働乕僽儖偱丄[UMEHOSHI ITA]偲PC傪愙懕偟偰丄乽Tera Term乿傪婲摦偟傑偡丅
PC懁偱婲摦偟偨乽Tera Term乿偵偍偄偰丄
埲壓偺傛偆偵愙懕偟偨帪偵弌尰偡傞USB偺COM億乕僩傪偺愝掕傪偟傑偡丅乮偙偺椺偱偼CM3傪慖傫偱偄傑偡丅乯
偙偺憖嶌偼丄乽Setup乿儊僯儏乕偺乽Serial Port乿儊僯儏乕偱峴偄傑偡丅
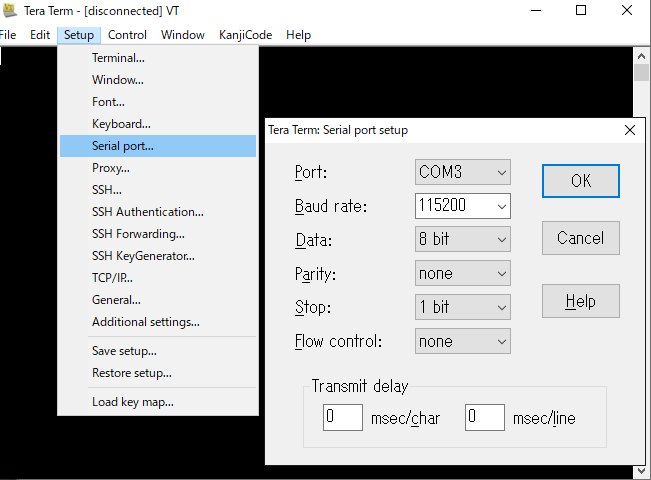
摨條偵乽Setup乿儊僯儏乕偺乽Tertminal乿儊僯儏乕偱丄夵峴乮New-line乯偱Receive:傪[LF]偵偟偰丄Tranmit:傪乽CR+LF]偵偟傑偡丅
埲忋偱丄僞乕儈僫儖偱擖椡偟偨暥帤楍偑USB傪夘偟偰丄乽UMEHOSHI ITA乿偵憲傜傟傞傛偆偵側傝傑偡丅
揔摉側暥帤楍(hello)傪擖椡偟偰[Enter]偟偰傒傑偟傚偆丅
偙傟偱昞帵偝傞偲偄偆偙偲偼丄擖椡偟偨暥帤楍偑乽UMEHOSHI ITA乿傊憲傜傟偰丄
偦偺墳摎偲偟偰丄僄僐乕(echo)偲側傞摨偠暥帤偑乽UMEHOSHI ITA乿偐傜栠偭偰偒偰昞帵偟偰偄傞偺偱偡丅
偙偺Echo儌乕僪傪OFF偡傞偲丄壗傕昞帵偟側偔側傝傑偡丅
乽UMEHOSHI ITA乿偼[E\r\n]傪庴怣偡傞偙偲偱丄Echo偺ON乛OFF偺愗傝懼偊偑偱偒傑偡丅
乮偙偺帪丄儌乕僪偑愗傝懼傢偭偨偙偲傪抦傜偣傞儊僢僙乕僕偑弌傑偡乯
埲壓偱偼丄亀E偲[Enter]亁偺僉乕憖嶌傪2夞峴偭偨屻偵亀T偲[Enter]亁偺擖椡憖嶌傪偟偰偄傑偡丅
偦偟偰丄嵟屻偵乽G10800090000067乿傪擖椡偟偰[80009000]斣抧偐傜16byte偺儊儌儕撪梕傪昞帵偟偄偰偄傞椺偱偡丅
hello
E
ECHO OFF
ECHO ON
G10800090000067
::10800090000051495AE359ED7A49E97DD297D964CA02F1
埲忋傛傝暘偐傞傛偆偵丄偙偺僞乕儈僫儖偱偼丄
乽umehoshiEdit乿奐敪僣乕儖側偳偱嶌偭偨UME愱梡Hex偺暥帤楍傪僐僺乕偟丄偙偙偵揬傝晅偗傞偙偲偱丄
乽UMEHOSHI ITA乿婎斅偵懳偟偰丄儊儌儕傊偺愝掕傗丄婓朷傾僪儗僗偐傜偺幚峴偺憖嶌偑偱偒傑偡丅
側偍丄乽Tera Term乿傪偍巊偄偺応崌丄乽Setup乿儊僯儏乕偺乽Save setup..乿偱丄惓偟偔摦嶌偱偒偨帪偺愝掕忣曬傪"TERATERM.INI"偵曐懚偡傞偙偲偑偱偒傑偡丅
偙偺愝掕偺曐懚傪峴偆偲丄師夞偺乽Tera Term乿婲摦偱愝掕崁栚偑斀塮偝傟傞偺偱丄夵傔偰愝掕偟捈偡偙偲側偟偵愙懕偟偰憖嶌偱偒傑偡丅
[UMEHOSHI IT] 偺惂屼
埲壓偱丄command.h偱掕媊偝傟傞_HANDLES億僀儞僞傪愭摢偡傞椞堟棙梡偟偨儅僋儘偺堄枴傪愢柧偟傑偡丅
僗僀僢僠偺忬懺
| 儅僋儘 | 夝愢 |
|---|
| _switch2_state() | 栠傝抣偑1偱偁傟偽SW2偺僗僀僢僠傪墴偟偰偄傞忬懺偱丄50夞埲忋屇傃弌偟偨忬懺偱偡丅
栠傝抣偑0偱偁傟偽SW2偺僗僀僢僠傪棧偟偰偄傞忬懺偱丄50夞埲忋屇傃弌偟偨忬懺偱偡丅
(墴偝傟偨忬懺偑偙偺儅僋儘屇傃弌偟偑50夞埲忋傪曄摦偟側偄応崌丄栠傝抣偼曄壔偟傑偣傫丅)
扨偵SW2偺僗僀僢僠忬懺傪挷傋傞偩偗偱偁傟偽偙偺儅僋儘偱側偔丄乽 (PORTB & 0x80) == 0乿偺敾掕傪巊偆偲傛偄丅
|
|---|
儕僙僢僩梡偺SW1偲丄擟堄梡搑偺SW2偑庢傝晅偗偱偒傑偡丅
_HANDLES[_IDX_CORE_TIMER_FUNC] 傪曄峏偟偰偄側偗傟偽丄SW2偺忬懺僠僃僢僋偺忬懺偼丄
擟堄偺僞僀儈儞僌偱_switch2_state() 儅僋儘偱敾抐偱偒傑偡丅
偙偺栠傝抣偑 1 偱偁傟偽墴偝傟偰偄傞偲敾抐偱偒傑偡丅
墴偝傟偰偄側偄忬懺偱偁傟偽 0 偑栠傝抣偱偡丅
偙偺抣偼丄僗僀僢僠僠儍僞儕儞僌傪敾掕偟側偄傛偆偵丄僐傾僞僀儅妱傝崬傒偱
50僒僀僋儖暘墴偟懕偗偰偄傞応崌偵1側傞敾掕傪偟偰偄傑偡丅
側偍丄偙偺娭悢偺栠傝帪娫偑抶墑偺帪娫傪懸偮栿偱偼側偔丄偡偖偵儕僞乕儞偡傞巇條偵側偭偰偄傑偡丅
丂乮偙偺僒僀僋儖偺抶墑偼丄僨僼僅儖僩偱乮1/40e6*22727*2=0.00113635昩偺妱傝崬傒廃婜*100=栺0.1昩乯屻偵忬懺偑斀塮偟傑偡丅乯
側偍SW2偼丄儕僙僢僩SW1傪墴偟偰棧偟偨帪偺敾掕偱墴偝傟偰偄傞偲丄
捠忢儕僙僢僩偲堎側傞僷儚乕ON摨摍偺弶婜壔儖乕僠儞偑丄僨僼僅儖僩偱屇傃弌偟偝傟傞傛偆偵側偭偰偄傑偡丅
乮僷儚乕ON帪偺弶婜壔偼丄SW1偵傛傞儕僙僢僩偲堎側傞弶婜壔偑娷傑傟偰偄傑偡乯
傑偨丄儕僙僢僩(SW1)偲丄SW2傪摨帪偵墴偟偰丄SW1傪棧偟偰偐傜傕SW2傪3昩埲忋墴偟懕偗傞偲丄僗儖乕儌乕僪偲偄偆摿暿側
儌乕僪傊偺慗堏偟傑偡丅
傑偨丄儕僙僢僩(SW1)偲丄SW2傪摨帪偵墴偟偰丄SW1傪棧偟偰偐傜傕SW2傪4昩埲忋墴偟懕偗傞偲丄僐儅儞僪儌乕僪偲偄偆摿暿側
儌乕僪傊偺慗堏偟傑偡丅
LED偺昞帵偲偦偺惂屼
D1,D2,D3偺売強偵LED偑庢傝晅偗偱偒傑偡丅乮側偍D3偼,暿搑偵僕儍儞僷攝慄偺敿揷晅偗傪偟側偄偲惂屼偱偒傑偣傫丅乯
D1,D2,D3偺偦傟偧傟傪傪丄LED1,LED2,LED3偲屇傫偱愢柧偟傑偡丅
僨僼僅儖僩偱僷儚乕ON偺帪偵LED1偑揰摂偟丄LED2偑徚摂偟傑偡丅
LED1偼丄儕僙僢僩僗僀僢僠乮SW1)偺憖嶌偩偗偱偼揰摂偟傑偣傫丅
婲摦帪偺LED1偼丄僷儚乕ON帪偺弶婜壔傪峴偭偰帪偵揰摂偟傑偡丅
儕僙僢僩(SW1)偲丄SW2傪摨帪偵墴偟偰丄SW1傪棧偟偰偐傜傕SW2傪墴偟偰偄傞応崌傕丄
僷儚乕ON帪偺弶婜壔偑峴傢傟偰揰摂偟傑偡丅
偦偟偰偦偺傑傑3昩埲忋偺SW2傪墴偟懕偗傞偲徚摂偟偰僗儖乕儌乕僪偵慗堏偟傑偡丅
(僷儚乕ON帪偵SW2傪墴偟懕偗偰傕摨偠偱丄LED1偼僷儚乕ON偺僞僀儈儞僌偱揰摂偟傑偡偑丄3昩屻偵
徚摂偟偰丄僗儖乕儌乕僪偵側傝傑偡丅)
偦偟偰偦偺傑傑3昩埲忋乮儕僙僢僩傗僷儚乕ON偐傜4昩埲忋乯偺SW2傪墴偟懕偗傞偲丄嵞傃揰摂偟偰僐儅儞僪儌乕僪偵慗堏偟傑偡丅
偙傟埲崀偵偍偗傞LED揰摂丒徚摂憖嶌偼帺桼偱偒傑偡丅乮僨僼僅儖僩偱婲摦3昩埲慜峴偭偨LED1僾儘僌儔儉憖嶌偼柍岠乯
#include <xc.h>傪峴偊偽丄壓婰偺偺傛偆偵憖嶌偱偒傑偡丅(價僢僩憖嶌偺捈屻偼壗傕偟側偄nop傪擖傟傑偡)
| 揰摂憖嶌 | 徚摂憖嶌 | 旛峫 |
|---|
| LED1 | PORTBSET = 0x8000; | PORTBCLR = 0x8000; | PORTB 偺bit15傪1偵偡傞偲揰摂偟傑偡丅
偙偺價僢僩偼_RB15儅僋儘偱嶲徠傗戙擖憖嶌偱偒傑偡丅偟偐偟丄
乽億乕僩偵懳偡傞摿掕偺價僢僩憖嶌柦椷偑楢懕偡傞応崌丄屻弎柦椷傪惓偟偔幚峴偱偒側偄働乕僗乿偑偁傞傛偆偱偡丅
偦偺応崌丄_RB15 = 1; asm("nop");偺傛偆側夞旔嶔偑偁傞傛偆偱偡偑丄儅僋儘柦椷偱側偔丄PORTBSET 傗丂PORTBCLR 傗丂PORTBINV偺柦椷傪
捈愙偵巊偭偨曽偑傛偄偱偟傚偆丅
|
|---|
| LED2 | _RB5 = 1; asm("nop"); | _RB5 = 0; asm("nop"); |
PORTB偺bit5偺抂巕偼丄
摨帪偵SP乮埑揹僽僓乕乯丄D4,D5乮愒奜慄LED乯惂屼梡僩儔儞僕僗僞偵宷偑偰偄偍傝丄楢摦偟傑偡丅
乮側偍揰摂偱偁傟偽丄PORTBSET = 0x0020; 偱峴偆傛偆側僐乕僪偺曽偑椙偄偱偟傚偆乯
|
|---|
側偍丄
LED3偼晹昳U17(RN4020偺BLE乯偺8Pin乮BLE偺愙懕忬懺偱揰摂乯偵宷偑偭偰偄傑偡丅
U17傪庢傝晅偗偟偰偄側偄忬懺偱丄
僕儍儞僷攝慄乮JMP9乯傪敿揷晅偗偡傞偲乽PIC32MX270F256B-I/SO乿偺RTS抂巕(_RB9)偵宷偑傝傑偡丅
CN6丄CN7偵愙懕偡傞儌乕僞側偳偺惂屼
CN6丄CN7偺奺偼抂巕乽H-Bridge Motor Drive乿偺夞楬峔惉偵側偭偰偄傑偡丅
偦傟偵傛傝丄CN6[1-2pin]偲CN6[3-4pin]偺娫傗CN7[1-2pin]偲CN6[3-4pin]偵
惓傑偨偼晧偺揹埑乮DC-JACK偺嫙媼揹埑Mv乯傪嫙媼偱偒傑偡丅
僷儚乕ON帪偺弶婜壔偱偼PWM乮(Pulse Width Modulation)偼巊傢側偄儌乕僪偵側偭偰偄傑偡丅
偦傟偵傛傝丄椺偊偽 RB2傪1, RB3傪0偵偡傞偩偗偱丄CN6偺1-2僺儞偑3-4僺儞傛傝Mv偺嫙媼揹埑暘偩偗崅偄揹埵偵側傝傑偡丅
乮偙傟偵傛傝CN6偵儌乕僞側偳傪愙懕偟偰偄傟偽嬱摦偱偒傑偡丅乯
偙傟傜傪惂屼偡傞柦椷偲抂巕柤偺弌椡忬懺偲僐僱僋僞偺弌椡忬懺偺娭學傪埲壓偵傑偲傔偰帵偟傑偡丅
壓婰偺0v傗Mv偺昞尰偼儘僕僢僋懁偺揹埵乮3.3倴乯偱偼偁傝傑偣傫丅DC-JACK嫙媼懁偺揹埵偱偡丅
丂CN6偺惂屼丂
| 愝掕僐乕僪 | RB3 | RB2 | CN6偺[1-2pin] | CN6偺[3-4pin] | CN6偺[3-4]傪儀乕僗偲偟偨[1-2]偺揹埵 |
|---|
| PORTBCLR = 0b0000000000001100; | 0 | 0 | Mv | Mv | 0v |
|---|
PORTBCLR = 0b0000000000001000;
PORTBSET = 0b0000000000000100; | 0 | 1 | Mv | 0v | +Mv |
|---|
PORTBCLR = 0b0000000000000100;
PORTBSET = 0b0000000000001000; | 1 | 0 | 0v | Mv | -Mv |
|---|
| PORTBSET = 0b0000000000001100; | 1 | 1 | 0v | 0v | 0v |
|---|
丂CN7偺惂屼丂
| 愝掕僐乕僪 | RB14 | RB13 | CN7偺[1-2pin] | CN7偺[3-4pin] | CN7偺[1-2]傪儀乕僗偲偟偨[3-4]偺揹埵 |
|---|
| PORTBCLR = 0b0110000000000000; | 0 | 0 | Mv | Mv | 0v |
|---|
PORTBCLR = 0b0100000000000000;
PORTBSET = 0b0010000000000000; | 0 | 1 | 0v | Mv | +Mv |
|---|
PORTBCLR = 0b0010000000000000;
PORTBSET = 0b0100000000000000; | 1 | 0 | Mv | 0v | -Mv |
|---|
| PORTBSET = 0b0110000000000000; | 1 | 1 | 0v | 0v | 0v |
|---|
忋婰偺傛偆側丄價僢僩偺僋儕傾傗僙僢僩柦椷偱丄婓朷偺價僢僩傪0傗1偵偡傞偙偲偱惂屼偟傑偡丅
側偍丄儌乕僞側偳傪晅偗偨応崌丄Mv傗-Mv偺揹埵偵側傞強偱
夞揮偟傑偡丅乮0v偺揹埵偺峴偺愝掕帪偼摦嶌偟傑偣傫丅乯
惓揮傗媡揮偺忬懺偼儌乕僞偺愙懕忬懺偱媡偵側傝傑偡丅
CN6丄CN7偺PWM乮Pulse Width Modulation)惂屼
僷儚乕ON帪偺弶婜壔偱偼PWM乮(Pulse Width Modulation)偼巊傢側偄忬懺偱偡丅
巊偆応崌偼乽_set_pwd_mode(1);乿偺儅僋儘幚峴偲乽T2CONbits.ON = 1;乿偺Timer2偺婡擻ON偱丄PWM傪巊偆忬懺偵偟傑偡丅
PWM偼丄Timer2偺僐儞儁傾 儌僕儏乕儖傪棙梡偟偰摦嶌偟偰偄傑偡丅(嶲峫)
撪晹偺廃曈儌僕儏乕儖梡僋儘僢僋乮PBCLK:40MHz)傪PR2=0x0FFFF偺廃婜偱巊偆暘夝擻乮1/40e6*0x10000=0.0016384昩乯偱
惂屼偟偰偄傑偡丅
側偍Timer2偺妱傝崬傒(0.0016384昩廃婜)偼丄僨僼僅儖僩偱壗傕偟側偄張棟乮IFS0CLR = 0x00000200偩偗乯側偭偰偄傑偡丅
偙偺儌乕僪愝掕娭楢偺儅僋儘傪埲壓偵帵偟傑偡丅
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
| _init_compare() |
_HANDLES[_IDX_INIT_COMPARE]偺娭悢傊偺億僀儞僞傪幚峴偡傞儅僋儘偱偡丅乮僔僗僥儉偱巊傢傟丄堦斒偵屇傃弌偡偙偲偼彮側偄偱偟傚偆乯
_HANDLES[_IDX_INIT_COMPARE]偵偼丄揹尮ON偺弶婜帪偱PWM傪巊傢側偄弶婜壔娭悢偑僙僢僩偝傟傑偡丅
乮 偙偺揹尮ON偺弶婜帪偼丄OC5CONbits.ON,OC1CONbits.ON, OC4CONbits.ON, OC3CONbits.ON 傪0偵偡傞偙偲偱
奺僐儞儁傾 儌僕儏乕儖傪柍岠偵偟偰偄傑偡丅乯
儕僙僢僩偩偗偱偼曄壔偟傑偣傫丅壓婰_set_pwd_mode(f)偱_HANDLES[_IDX_INIT_COMPARE]傪曄峏偡傞偙偲偱儌乕僪傪曄峏偟偰偄傑偡丅
|
|---|
| _set_pwd_mode(f) | 倖傪1偱幚峴偡傞偲丄PWM 傪巊偆弶婜壔偱丄倖傪0偱幚峴偡傞偲PWM傪巊傢側偄弶婜壔傪峴偄傑偡丅
偙偺幚峴偵傛傝丄摨帪偵 _HANDLES[_IDX_INIT_COMPARE] 傕愝掕偝傟傑偡丅偦傟偵傛傝儕僙僢僩屻傕儌乕僪偑帩懕偟傑偡丅
倖傪1偱幚峴偡傞偲丄PWM 傪巊偆弶婜壔愝掕傪偟傑偡丅偦偺撪梕偼丄 Timer2 傪偙偺弌椡僐儞儁傾 儌僕儏乕儖偺僋儘僢僋尮偲偟偰巊偆傛偆偵
愝掕偟丄OC5CONbits.ON, OC1CONbits.ON, OC4CONbits.ON, OC3CONbits.ON 傪1偵偟偰奺僐儞儁傾 儌僕儏乕儖傪桳岠偵偟偰偄傑偡丅
僨僼僅儖僩偺 Timer2廃婜偼丄栺0.0016昩偱偡偑丄婲摦帪偼婡擻偑柍岠偵偟偰偁傞偺偱丄
PWM 傪巊偆応崌偼丄
暿搑偵乽T2CONbits.ON = 1乿偺柦椷偱Timer2偺婡擻傪桳岠偵偡傞昁梫偑偁傝傑偡丅
(Timer2偺妱傝崬傒傪桳岠偵偡傞IEC0bits.T2IE = 1; 偺愝掕偼丄昁恵偱偼偁傝傑偣傫)
偙偺PWM 傪巊偆愝掕偱偼丄RB2丄RB3丄RB14丄RB13偺抂巕傪侾偵偡傞僨儏乕僥傿斾傪
OC5RS丄OC1RS丄OC3RS丄OC4RS偺儗僕僗僞愝掕偱峴偄傑偡丅
偦偺愝掕抣偼0乣0x0ffff偺16價僢僩偱丄偙偺愝掕斾偑僨儏乕僥傿斾偺0乣100%偵懳墳偟傑偡丅
|
|---|
乽_set_pwd_mode(1);乿偲乽T2CONbits.ON = 1;乿偺幚峴偱PWM偑摥偔栿偱偡偑
RB2丄RB3丄RB14丄RB13偺懳墳偡傞弌椡僨儏乕僥傿斾100%偵偡傞儗僕僗僞偺愝掕傪壓婰偵傑偲傔傑偡丅
乮乯
丂CN6偺惂屼丂
| RB2偺OC5RS | RB3偺OC1RS | CN6偺[3-4]傪儀乕僗偲偟偨[1-2]偺揹埵 |
|---|
| 0x0ffff | 0 | +Mv |
|---|
| 0 | 0x0ffff | -Mv |
|---|
丂CN7偺惂屼丂
| RB14偺OC3RS | RB13偺OC4RS | CN7偺[1-2]傪儀乕僗偲偟偨[3-4]偺揹埵 |
|---|
| 0 | 0x0ffff | +Mv |
|---|
| 0x0ffff | 0 | -Mv |
|---|
忋婰OC5RS丄OC1RS丄OC3RS丄OC4RS偺
儗僕僗僞偺愝掕偼丄PWM偺僨儏乕僥傿斾偺愝掕偱丄乮1乣0x0ffff乯偺斖埻偱峴偄傑偡丅
乮0x0ffff偑嵟戝弌椡偱丄0偵偡傞偲丄[1-2]偲[3-4]偺揹埵嵎偼僛儘偵側傝傑偡丅乯
撪晹揑偵偼丄OC5CON丄OC1CON丄OC3CON丄OC4CON偺弌椡僐儞儁傾惂屼儗僕僗僞偺愝掕傪僷儖僗暆曄挷儌乕僪偵偟偰丄
Timer2 傪僋儘僢僋尮偵偟偰棙梡偟偰偄傑偡丅
偦偟偰偦傟偧傟偺偙傟傜儗僕僗僞偵偼懳偵側傞OC5R丄OC1R丄OC3R丄OC4R儗僕僗僞偑偁傞偺偱偡偑丄
幚嵺偵偼偙傟偑TMR2偲斾妑偝傟偰僨儏乕僥傿偑寛傑傝傑偡丅
偦偟偰丄TMR2乮16bit僞僀儅儗僕僗僞乯僇僂儞僩傾僢僾偟偰 PR2乮16bit廃婜儗僕僗僞乯偑堦抳偟偨僞僀儈儞僌偱丄
OC5RS丄OC1RS丄OC3RS丄OC4RS偑
OC5R丄OC1R丄OC3R丄OC4R偵僙僢僩偝傟偰丄師偺僨儏乕僥傿斾偑寛傑傝傑偡丅
側偍丄OC5RS丄OC1RS丄OC3RS丄OC4RS偺弶婜愝掕抣偼丄
偦傟偧傟
_UME_CN6_OC5RS丄
_UME_CN6_OC1RS丄
_UME_CN7_OC4RS丄
_UME_CN7_OC3RS
偺儅僋儘曄悢偱愝掕偝傟傑偡丅
乮偙偺儅僋儘曄悢偼儕僙僢僩偱弶婜壔偝傟傑偣傫丅乯
[UMEHOSHI IT] 偺僒僂儞僪惂屼丄僄儔乕捠抦
_RB5偺抂巕偵宷偑傞SP乮埑揹僽僓乕乯偱壒傪弌偟傑偡丅乮LED2傗愒奜慄LED偲楢摦偟傑偡乯
壒偺廃攇悢偼僐傾僞僀儅偺妱傝崬傒偱曄峏偝傟丄埲壓偺儅僋儘偱惂屼偱偒傑偡丅乮奺愝掕偼丄屻弎偺僨僶僢僋梡價乕僾娭悢偵傕塭嬁偟丄椉曽傪巊偆偙偲偼偱偒傑偣傫丅乯
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
| _UM_CP0_SET_COMPARE | 偙偺儅僋儘曄悢偺弶婜抣偼22727u偺儔偺壒(440Hz)偱丄戙擖偱壒怓偑曄傢傞丅
乮僐傾僞僀儅妱傝崬傒撪偱丄妱傝崬傒廃婜曄峏偵巊偆曄悢側偺偱丄壓婰娭悢孮偵戝偒偔塭嬁偟傑偡丅乯
1/40e6偑僐傾僞僀儅偺廃婜偱丄偙偺愝掕偵傛傞廃攇悢偼丄1/(1/40e6*_UM_CP0_SET_COMPARE)偱嶼弌偱偒傑偡丅 |
|---|
| _set_beep_period(d) | 幚峴偡傞偲丄堷悢偱0傛傝戝偒側悢傪巜掕偟偨応崌丄偦偺夞悢偩偗僽僓乕抂巕傪斀揮偡傞偙偲偱壒傪柭傜偟傑偡丅
斀揮廃婜偼丄僐傾僞僀儅偺廃婜傪巜掕偡傞_UM_CP0_SET_COMPARE偱寛傑傞偺偱丄壒偑偑弌傞挿偝偼偙偺愝掕偵埶懚偟傑偡丅
側偍堷悢偵-1傪巜掕偡傞偲丄婜娫柍偟偱塱懕揑偵柭傜偟傑偡丅
柭偭偰偄傞搑拞偱敪壒婜娫傪曄峏偱偒傑偡丅乮0偺巜掕偱巭傑傝傑偡乯 |
|---|
| _UM_PTR_BEEP_AREA | 屻弎偺壒偺搊榐娭悢梡偺婰壇堟傪娗棟偡傞億僀儞僞偱曄峏壜擻乮弶婜偺婰壇堟偼[3*16+1+300]byte乯
偙偺婰壇堟偺梫慺偼僨乕僞偑懚嵼偡傞斖埻傪嵞惗偝偣傞傛偆偵巊偄丄愭摢偵僨乕僞偑柍偗傟偽嵞惗偟傑偣傫丅 |
|---|
| _set_beep_sound_node(i,c,s,n) | 壒偺搊榐娭悢偱丄忋婰乽_UM_PTR_BEEP_AREA乿偺i斣栚偵丄c偺尞斦斣崋偱丄s偺挿偝偺壒偲丄n偺挿偝偺柍壒傪搊榐偟傑偡丅
偙偺娭悢偼廃婜偑0.5mS 廃婜偱Timer1妱傝崬傒傪ON偵偟偰巊偆慜採偱偡丅乮set_switching_period(125)偲偟傑偡丅乯
偙偺帪丄壒偺挿偝偺堷悢偼32暘壒晞丗0.0625昩傪1偲偟偨巜掕偵側傝傑偡丅
(2側傜16暘壒晞丄4側傜8暘壒晞丄8側傜4暘壒晞(0.5昩)丄16偑2暘壒晞丄32偑慡壒晞)
i偺堷悢偑0偺帪丄_UM_PTR_BEEP_AREA傪婰壇堟偵巊偆弶婜壔偑峴傢傟傞丅乮偙偺儅僋儘曄悢偵帺恎偱梡堄偟偨婰壇堟傪巜掕偱偒傞丅
i偺斖埻偼丄偙偺婰壇堟偵傛傞偑丄僨僼僅儖僩偱偼0偐傜99偺壒搊榐偑壜擻偱偡丅
i偑0偺愭摢梫慺偺c偺尞斦斣崋偑埲奜偱壒偺惗惉偑巒傑傝傑偡乮墘憈偑巒傑傝傑偡乯丅
嵞惗偼丄乽_UM_PTR_BEEP_AREA乿偺搊榐僨乕僞偵廬偄弴師偵峴傢傟丄c偺尞斦斣崋偑0偺強偱廔傢傝傑偡丅
僨僼僅儖僩偱偼儖乕僾忬懺偱丄嵟屻偺梫慺偺壒偺師偼愭摢偵栠偭偰壒傪惗惉偟傑偡丅
偙偺嵞惗偼Timer1偺妱傝崬傒傪嫋壜乮T1CONSET =0x8000;乯偡傞昁梫偑偁傝傑偡丅
|
|---|
| _set_beep_code(d) | 儌乕儖僗怣崋偺傛偆側壒偺搊榐娭悢偱丄忋婰乽_UM_PTR_BEEP_AREA乿偺婰壇堟偵搊榐偟傑偡丅
堷悢d偺忋埵係價僢僩偺1偑挿壒丄0偑抁壒丄壓埵4價僢僩偼[CB:1][LN:3]偱師偺堄枴偱偡丅
[CB偺1價僢僩]慜偺僶僀僩偵懕偔壒偺応崌偼侾丄慜偺僶僀僩偲壒偲棧傟傞応崌偼0
[LN偺3價僢僩]忋埵係價僢僩偺壒挿傪堄枴偡傞1傗0偺桳岠側價僢僩悢
椺 G偺僐乕僪偱偁傟偽 乽乗 乗 -乿壒偱丄師偺價僢僩楍偲側傞丅
丂丂丂丂丂丂丂丂 1100 0011
忋埵4價僢僩乽1100乿丄CB偑乽0乿丄LN偑乽011乿偺3偮偺壒傪堄枴偡傞丅
側偍丄CB偑乽1乿偱偁傞帪丄偙傟偑懕偔僶僀僩偺斖埻傪孞傝曉偟傑偡丅
偙偺娭悢傪暋悢夞巊偆偙偲偱丄偦偺搊榐弴偵壒偑嵞惗偝傟傑偡丅
傑偨摿暿偵d傪0b11110000偵偡傞偲丄挿偄嬫愗傝梡偺柍壒搊榐偱丄d傪0偵偡傞偲偦傟埲崀偺搊榐偑偱偒側偔側傝傑偡丅
僨僼僅儖僩偱偼儖乕僾忬懺偱丄嵟屻偺梫慺偺壒偺師偼愭摢偵栠偭偰壒傪惗惉偟傑偡丅
|
|---|
| _set_switching_period(d) | 柭偭偰偄傞搑拞偱敪壒婜娫乮僥儞億乯傪曄峏偱偒傑偡丅偙偺僥儞億偵憡摉偡傞抣偼僐傾僞僀儅偺廃婜偵埶懚偟傑偡丅
僨僼僅儖僩偼90偱丄50乣150掱搙巊偆偺偑傛偄偱偟傚偆丅乮彫偝偄偡偓傗戝偒偡偓傞偲晄嬶崌偑惗偠傑偡乯 |
|---|
| _clear_beep_code() | _set_beep_sound_node(i,c,s,n)傗_set_beep_code(d) 偺撪晹忣曬傪弶婜壔偟偰壒傪掆巭偟傑偡丅
乮_RB5 = 0偺幚峴偱LED2傕徚摂偟傑偡丅乯偦偟偰嵞傃愭摢偺壒偐傜搊榐偱偒傞忬懺偵偟傑偡丅
傑偨屻弎偡傞bebug_乣偺娭悢傗僄儔乕壒丄僄儔乕忣曬偺暅婣傕峴傢傟傑偡丅
乮側偍丄壒偑柭偭偰偄側偄帪偺弶婜壔偼懄嵗偵幚峴偝傟偰儕僞乕儞偟傑偡丅偟偐偟壒偑柭偭偰偄傞応崌偼丄
弶婜壔偺梊栺偩偗峴傢傟丄幚嵺偺弶婜壔偼壒惗惉偺妱傝崬傒偲楢摦偡傞偨傔偵儕僞乕儞偺帪娫偑偐偐傝傑偡丅
偦偺応崌丄妱傝崬傒廃婜偺愝掕偵傛偭偰偼丄捈屻偺壒搊榐娭悢偺幚峴偑偱偒側偄偙偲偑偁傝傑偡丅乯 |
|---|
| _UM_PTR_GOTO_BEEP | _set_beep_sound_node(i,c,s,n)傗_set_beep_code(d)偱搊榐偟偨楢懕壒偼丄
搊榐偟偨壒偺惗惉屻偵丄_UM_PTR_GOTO_BEEP偺億僀儞僞偺搊榐忣曬偱嵞惗偡傞嫇摦偵側偭偰偄傑偡丅
偦偟偰丄僨僼僅儖僩偺_UM_PTR_GOTO_BEEP偼_UM_PTR_BEEP_AREA偲摨偠偵側偭偰偍傝丄嵞惗偑儖乕僾偡傞巇慻傒偵側偭偰偄傑偡丅
偦偟偰丄_UM_PTR_GOTO_BEEP傪NULL偵偡傞偲丄偙偺儖乕僾偑摥偐側偔側傝傑偡丅
偮傑傝丄扨弮偵乽_UM_PTR_GOTO_BEEP = NULL乿偲偡傞偲儖乕僾惗惉偱側偔扨敪揑側搊榐壒偺嵞惗忬懺偵側傝傑偡丅
|
|---|
| _UME_CONFIG | 僨僼僅儖僩偱壓埵偺1byte栚偑丄0x06偵側偭偰偄傑偡丅
0x01偺價僢僩偑棫偭偰偄傟偽壒偺ON/OFF偺惂屼傪乽D1乿偵斀塮偟傑偡丅
0x02偺價僢僩偑棫偭偰偄傟偽壒偺ON/OFF偺惂屼傪乽D2傗僽僓乕側偳乿偵斀塮偟傑偡丅
0x04偺價僢僩偑棫偭偰偄傟偽丄僄儔乕捠抦壒傪壒偺ON/OFF偺惂屼偵斀塮偟傑偡丅
偮傑傝丄僄儔乕捠抦偼僨僼僅儖僩偱ON偵側偭偰偄傑偡丅
|
|---|
側偍丄_set_beep_sound_node(i,c,s,n)娭悢偲_set_beep_code(d)娭悢偺椉曽傪摨帪偵巊偆嶌昳偼偱偒傑偣傫丅
_set_beep_code(d)偼僐傾僞僀儅偱僞僀儈儞僌傪嶌偭偰偍傝丄壒偺廃攇悢偲忋偘傞偲壒惗惉偺僥儞億傕懍偔側傝傑偡丅
_set_beep_sound_node(i,c,s,n)偺壒怓偼僐傾僞僀儅偱丄僥儞億偼Timer1偺妱傝崬傒廃婜偱曄壔偟傑偡丅乮Timer1偺妱傝崬傒傪嫋壜偑昁梫乯
忋婰偳偪傜偐傪巊偆偙偲偱丄撪晹偺忬懺偑曄壔偟偰丄壒惗惉偺奐巒偲敾抐偝傟傑偡丅
Timer1偺妱傝崬傒傪嫋壜乮T1CONSET =0x8000;乯偟偰丄椉曽偺搊榐娭悢傪巊偆偲丄椉曽偺摦嶌傪巒傔傑偡偑丄
壒偺僞僀儈儞僌偑廳側傞偺偱丄栿偑暘偐傜側偄壒偑惗惉偝傟傞偱偟傚偆丅
僄儔乕捠抦偵偮偄偰
僨僼僅儖僩偱師偺僽僓乕捠抦偑峴傢傟傑偡丅側偍埑揹僽僓乕丄D2丗LED丄愒奜慄LED偼宷偑偭偰偄傞偺偱楢摦偟傑偡丅
乮丒偑抁壒丄乕偑挿壒偱偡丅
僾儘僌儔儈儞僌偵傛偭偰偼僄儔乕捠抦偑弌偒側偄応崌傕偁傝傑偡丅乯
| 愭摢壒僷僞乕儞 | 懕偔壒偺4僷僞乕儞 | 堄枴 |
|---|
| 丒丒丒乕 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒丒丒乕丂 |
USB傊偺庴怣姰椆忬懺僄儔乕 |
| 丒丒丒乕 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒丒乕丒丂 |
USB傊偺憲怣姰椆忬懺僄儔乕 |
| 丒丒丒乕 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒乕丒丒丂 |
USB偺僔乕働儞僗僄儔乕 |
| 丒丒丒乕 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂乕丒丒丒丂 |
USB偺梊婜偟側偄忬懺僄儔乕 |
| 丒丒乕丒 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒丒丒乕丂 |
UART僷儕僥傿僄儔乕敾掕 |
| 丒丒乕丒 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒丒乕丒丂 |
UART僼儗乕儈儞僌僄儔乕(STOPbit堎忢) |
| 丒丒乕丒 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒乕丒丒丂 |
USRT庴怣僶僢僼傽僆乕僶乕儔儞 僄儔乕 |
| 丒丒乕丒 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂乕丒丒丒丂 |
梊婜偟偰偄側偄憲怣妱傝崬傒 |
| 丒丒乕丒 | 丒丒丒丒丂丒丒丒丒丂丒丒丒乕丂丒丒丒丒丂 |
UART庴怣張棟偱僶僢僼傽張棟幐攕 |
| 丒丒乕丒 | 丒丒丒丒丂丒丒丒丒丂丒丒乕丒丂丒丒丒丒丂 |
UART憲怣張棟偱憲怣僶僢僼傽僼儖偱愝掕幐攕 |
| 丒丒乕乕 | 丒丒丒丒丂丒丒丒丒丂丒丒丒丒丂丒丒丒乕丂 |
ADC庢摼僨乕僞偺憲怣偑娫偵崌傢側側偄僄儔乕 |
偙傟傜偺捠抦偼丄屻弎偺_debug_hex4傗debug_hex16傪巊偭偰峴傢傟傑偡丅乮n偺id偼19傪巊偭偰偄傑偡乯
[UMEHOSHI IT] 僨僶僢僋偺僽僓乕壒惂屼
忋婰偺_set_beep_code(d) 婡擻傪棙梡偟偰丄僨僶僢僋梡偵曄悢偺撪梕傪壒偱妋擣偡傞偨傔偺僨僶僢僋梡娭悢傪梡堄偟偰偄傑偡丅
丂乮偙傟偼丄_set_beep_code(0x0f0);偺傛偆側柍壒偺搊榐僐乕僪偲暪梡偟偰巊偆偙偲傕壜擻偱偡乯
傑偨丄撪晹偺僄儔乕偺忬懺傪價乕僾壒偱妋擣偡傞偙偲傕偱偒傑偡丅
埲壓偵娭楢儅僋儘傪帵偟傑偡丅
側偍丄奺僄儔乕壒偺惗惉僷僞乕儞偼戞2堷悢偱巜掕偝傟傑偡偑丄壒偼忋埵價僢僩偐傜壓埵價僢僩偲憲弌偝傟傑偡丅
椺偊偽丄0xA5 偺僷僞乕儞偱偁傟偽丄1010 0101偱偡偑丄偦傟偼乕丒乕丒丒乕丒乕偲柭傝傑偡丅丂乮丒偑抁壒丄乕偑挿壒偱偡丅乯
側偍丄壓婰儅僋儘偺戞1堷悢n偺幆暿斣崋偼丄0乣18傪巊偭偰偔偩偝偄丅
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
| int _debug_count(n,c,b) | b偑1偺帪丄n偺幆暿斣崋偱丄c偺夞悢幚峴屻偵n偺4價僢僩僷僞乕儞偺壒傪搊榐偟傑偡丅
(傛偭偰n偺巜掕斖埻偼0偐傜15偱偡乯
n偺幆暿斣崋偱搊榐偟偨壒偑搊榐偝傟傞偲丄偦偺斣崋偱偺壒偺搊榐偼弌棃側偔側傝傑偡丅
b偑1偱壒傪搊榐偟偨帪傗丄偦傟埲崀偺偺栠傝抣偼1偵側傝傑偡丅
偙偺壒偺搊榐偼忋婰偱帵偡set_beep_code(d)娭悢偱峴傢傟傑偡丅傛偭偰掆巭偵 _clear_beep_code() 傕巊偊傑偡丅
//巊偄曽椺
static int b0,b1,b2;
b0=debug_count(0, 100, 1);//偙偺柦椷傪100夞捠夁偟偨帪偵b0偑true偱丄0偺4bit壒搊榐
// 丒丒丒丒丒丒丒丒丒丒丒丒
b1=debug_count(1, 50, b0);//b0偑true偱丄50夞捠夁偟偨帪偵丄b1偑true偱丄1偺4bit壒搊榐
// 丒丒丒丒丒丒丒丒丒丒丒丒
debug_count(2, 1, b1);//b1偑true偱丄1夞捠夁偟偨帪偵丄丄2bit偺4bit僷僞乕儞壒偑搊榐
|
|---|
| int _debug_hex4(n,c,b) | b偑1偺帪丄n偺幆暿斣崋偱丄c偺壓埵4價僢僩偺壒傪搊榐偟傑偡丅搊榐偟偨弴斣偱壒傪柭傜偟傑偡丅
n偺幆暿斣崋偱搊榐偟偨壒偑搊榐偝傟傞偲丄偦偺斣崋偱偺壒偺搊榐偼弌棃側偔側傝傑偡丅
b偑1偱壒傪搊榐偟偨帪傗丄偦傟埲崀偺偺栠傝抣偼1偵側傝傑偡丅(偦傟埲奜偼0傪曉偡)
偙偺壒偺搊榐偼忋婰偱帵偡set_beep_code(d)娭悢偱峴傢傟傑偡丅傛偭偰掆巭偵 _clear_beep_code() 傕巊偊傑偡丅
|
|---|
| int _debug_hex8(n,c,b) | b偑1偺帪丄n偺幆暿斣崋偱丄c偺壓埵8價僢僩偺壒傪搊榐偟傑偡丅搊榐偟偨弴斣偱壒傪柭傜偟傑偡丅
n偺幆暿斣崋偱搊榐偟偨壒偑搊榐偝傟傞偲丄偦偺斣崋偱偺壒偺搊榐偼弌棃側偔側傝傑偡丅
b偑1偱壒傪搊榐偟偨帪傗丄偦傟埲崀偺偺栠傝抣偼1偵側傝傑偡丅(偦傟埲奜偼0傪曉偡)
|
|---|
| int _debug_hex16(n,c,b) | b偑1偺帪丄n偺幆暿斣崋偱丄c偺壓埵16價僢僩偺壒傪搊榐偟傑偡丅搊榐偟偨弴斣偱壒傪柭傜偟傑偡丅
n偺幆暿斣崋偱搊榐偟偨壒偑搊榐偝傟傞偲丄偦偺斣崋偱偺壒偺搊榐偼弌棃側偔側傝傑偡丅
b偑1偱壒傪搊榐偟偨帪傗丄偦傟埲崀偺偺栠傝抣偼1偵側傝傑偡丅(偦傟埲奜偼0傪曉偡)
|
|---|
| int _debug_hex32(n,c,b) | b偑1偺帪丄n偺幆暿斣崋偱丄c偺32價僢僩偺壒傪搊榐偟傑偡丅搊榐偟偨弴斣偱壒傪柭傜偟傑偡丅
n偺幆暿斣崋偱搊榐偟偨壒偑搊榐偝傟傞偲丄偦偺斣崋偱偺壒偺搊榐偼弌棃側偔側傝傑偡丅
b偑1偱壒傪搊榐偟偨帪傗丄偦傟埲崀偺偺栠傝抣偼1偵側傝傑偡丅(偦傟埲奜偼0傪曉偡)
//忋婰偺奺庬偺巊偄曽偺椺
static int t0,t1,t2,t3,t4;
t0=_debug_hex4(0,0x5,1); // 0x5偺偺壒僷僞乕儞傪丄1偺ID斣崋偱搊榐
t1=_debug_hex4(1,0,t0); // 忋婰偑搊榐嵪傒偱偁傟偽丄0偺壒僷僞乕儞傪1偺ID斣崋偱搊榐
t2=_debug_hex8(1,2,t1);
if(t2 && !t3) _set_beep_code(0x0f0); //柍壒
t3=_debug_hex16(0,15,t2);
t4=_debug_hex32(18,255,t3);
|
|---|
| int _debug_point(n, c) | n偺斣崋弴偱梊憐捠傝偺婰弎埵抲傪count夞悢摦嶌偟偰偄傞偐挷傋傞娭悢
(n偺價僢僩僷僞乕儞偺壒搊榐傪丄c夞悢偺妋擣帪偵峴偭偰偄傞偑丄撪晹偱偼debug_count傪棙梡偟偰幚尰偟偰偄傑偡丅
傛偭偰丄debug_count傪暪梡偟偰巊偆偲惓偟偔摦嶌偱偒側偄偙偲偑偁傝傑偡丅)
n偺幆暿斣崋偼丄0偐傜丄1丄2丄丒丒15偲弴斣偵巜掕偟偰巊偄丄搑拞偱巊傢側偄斣崋偑偁傞偲丄偦傟埲崀偺斣崋傪巜掕偟偨売強偼婡擻偟傑偣傫丅
//忋婰偺奺庬偺巊偄曽偺椺
_debug_point(1, 1);// 0偺壒偑搊榐嵪傒偺応崌偵丄2夞捠夁偟偨傜1偺僷僞乕儞偺壒傪柭傜偡傛偆偵1偺幆暿斣崋偱搊榐
丒丒丒擟堄僐乕僪丒丒丒
_debug_point(0, 2);// 2夞捠夁偟偨傜0偺僷僞乕儞偺壒傪柭傜偡傛偆偵0偺幆暿斣崋偱搊榐(偙偙偐傜搊榐偑巒傑傞)
丒丒丒擟堄僐乕僪丒丒丒
_debug_point(2, 10);// 1偺壒偑搊榐嵪傒偺応崌偵丄10夞捠夁偟偨傜2偺僷僞乕儞偺壒傪柭傜偡傛偆偵2偺幆暿斣崋偱搊榐
|
|---|
_debug_hex4丄_debug_hex8丄_debug_hex16丄 _debug_hex32偺戞1堷悢n偺幆暿斣崋偼丄偦傟偦傟偱0乣18偺斖埻偱巜掕偱偒傑偡丅
傑偨丄_clear_beep_code() 偱壒偺掆巭偲弶婜壔偑壜擻偱偡丅
USB傪夘偟偨捠怣
USB傪夘偟偰乽UME愱梡Hex偺忣曬側偳偺僐儅儞僪憖嶌乿偱僾儘僌儔儉揮憲傗幚峴奐巒傪惂屼偟偰偄傑偡偑丄
乽僂儊丒僄僨傿僢僩僾儘僌儔儉乿撪偐傜憲庴怣柦椷傪巊偆偙偲傕壜擻偱偡丅
偦偺偨傔偺儅僋儘偼師偵帵偟傑偡丅
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
| _send_ume_id() | USB傊僶乕僕儑儞暥帤楍(尰嵼偺暥帤楍偼"ume202504")傪憲怣偟傑偡丅乮夵峴傪娷傒傑偣傫乯 |
|---|
| _send_string(s) | USB傊s偺暥帤楍傪憲怣偟傑偡丅乮夵峴傪娷傒傑偣傫乯 |
|---|
| _send_decimal(d,w) | USB傊d偺int忣曬傪暥帤楍偵曄姺偟丄w偺暆偵偟偰憲怣偟傑偡丅乮夵峴傪娷傒傑偣傫乯
+傑偨偼-偺晞崋偑晅偒傑偡丅乮w偺暆偵枮偨側偄応崌偼敿妏偺僗儁乕僗傪杽傔偨暥帤楍偵偟偰偄傑偡丅乯
w偑懌傝側偄応崌偼丄奼挘偝傟偰忣曬偑敳偗偰弌椡偝傟傞偙偲偼偁傝傑偣傫丅 |
|---|
| _send_padding_uint(d,c,w) | USB傊d(unsigned忣曬偲偟偰埖偆乯傪暥帤楍偵曄姺偟丄w偺暆偵偟偰憲怣偟傑偡丅乮夵峴傪娷傒傑偣傫乯
+傗-偺晞崋偼晅偒傑偣傫丅w偺暆偵枮偨側偄応崌偼c偺暥帤傪杽傔偨暥帤楍偵偟偰偄傑偡丅
w偑懌傝側偄応崌偼丄懌傝側偄晹暘偺忋埵寘偑寚偗偨暥帤楍忣曬偵側傝傑偡丅
椺丗_send_padding_uint(128,'0',5); // "00128"偑憲怣 |
|---|
| _send_char(c) | USB傊c偺1僶僀僩傪憲怣偟傑偡丅乮撪晹僶僢僼傽偺忬懺偵傛偭偰丄偡偖偵憲怣偝傟側偄偙偲偑偁傝傑偡丅乯 |
|---|
| _send_hex_low(d) | uint32_t偺堷悢d偺壓埵16bit傪4寘16恑暥帤楍偵曄姺偟偰USB傊憲怣偟傑偡丅
偙偺暥帤楍暲傃偼價僢僋僄儞僨傿傾儞偺暲傃偱弌椡偟傑偡丅椺偊偽(256+15)偺僨乕僞偼"010F"偺暥帤楍偱偡丅
乮撪晹僶僢僼傽偺忬懺偵傛偭偰丄偡偖偵憲怣偝傟側偄偙偲偑偁傝傑偡丅乯 |
|---|
| _send_hex_hi(d) | uint32_t偺堷悢d偺忋埵16bit傪4寘16恑暥帤楍偵曄姺偟偰USB傊憲怣偟傑偡丅
乮撪晹僶僢僼傽偺忬懺偵傛偭偰丄偡偖偵憲怣偝傟側偄偙偲偑偁傝傑偡丅乯 |
|---|
| _send_16byte(d) | uint16_t偺堷悢偺僶僀僫儕傪USB傊憲怣偟傑偡丅
2僶僀僩丄儕僩儖僄儞僨傿傾儞乮壓埵僶僀僩丄師偺忋埵僶僀僩偺弴乯偱偺USB憲怣偱偡丅
乮撪晹僶僢僼傽偺忬懺偵傛偭偰丄偡偖偵憲怣偝傟側偄偙偲偑偁傝傑偡丅乯 |
|---|
| _set_break_buffer() | 忋婰偱乽撪晹僶僢僼傽偺忬懺偵傛偭偰丄偡偖偵憲怣偝傟側偄偙偲偑偁傝傑偡丅乿偲偡傞柦椷偑偁傝傑偡偑丄
偙偺僶僢僼傽撪偺僨乕僞傪嫮惂揑偵憲弌偡傞傛偆偵懀偡柦椷偱偡丅乮僼傽僀儖僗僩儕乕儉偺flash偵憡摉偟傑偡乯 |
|---|
| _request_acc_outbuff(id) | 堷悢偱妱傝崬傒偵墳偠偨id傪巜掕傪偟丄忋婰弌椡柦椷偺傾僋僙僗梫媮傪偟偰丄
庢摼偱偒偨傜1丄幐攕偱0傪曉偟傑偡丅
忋婰USB傊偺弌椡柦椷偼丄僶僢僼傽儕儞僌張棟傪偟偰偄傑偡丅
UME愱梡Hex偺'R' 暥帤楍僐儅儞僪偵傛傞幚峴屇傃弌偟撪偱丄忋婰USB傊偺弌椡柦椷傪巊偆応崌偼栤戣偑婲偙傝傑偣傫偑丄
僞僀儅妱傝崬傒撪偐傜丄偙傟傜弌椡柦椷傪巊偆応崌丄僶僢僼傽偺攔懠惂屼偟側偄偲丄晄嬶崌偑惗偠傑偡丅
偦偙偱僶僢僼傽偺傾僋僙僗尃傪梫媮偟偰丄庢摼偱偒偨応崌偩偗弌椡柦椷傪巊偊偽傛偄儈儏乕僥僢僋僗 (Mutex)偵憡摉偡傞惂屼傪幚尰偡傞傕偺偱偡丅
堷悢偱巜掕偡傞偺偼command.h偵婰弎偝傟傞乽_ID_ACCESS_XXXX乿傪巜掕偟傑偡丅
偙偺XXXX偺昞尰偼妱傝崬傒偺庬椶偵墳偠偰掕媊偝傟偰偄傑偡丅
椺偊偽Timer4偺妱傝崬傒撪偱丄忋婰USB傊偺憲怣柦椷傪巊偆応崌丄
_request_acc_outbuff(_ID_ACCESS_T4_TASK)偺栠傝抣偱1偑摼傜傟偨応崌偩偗峴偆傛偆偵巊偄傑偡丅
偦偟偰USB傊偺憲怣柦椷巊梡屻偱丄
懍傗偐偵_release_acc_outbuff(_ID_ACCESS_T4_TASK)偱傾僋僙僗尃傪奐曻偡傞昁梫偑偁傝傑偡丅
乮奐曻偟側偄偲丄捠忢偺UME愱梡Hex柦椷偺墳摎傗丄懠偺妱傝崬傒撪偱偺USB憲怣偑偱偒側偔側傝傑偡丅乯 |
|---|
| _release_acc_outbuff(id) | 忋婰偺_request_acc_outbuff(id)偱摼偨傾僋僙僗尃傪奐曻偟傑偡丅乮栠傝抣側偟乯 |
|---|
| _get_capacity() | 忋婰偺奺庬USB傊弌椡偡傞娭悢偼丄USB偺憲怣僶僢僼傽偵婰壇偝傟丄憲怣偱偒傞僞僀儈儞僌偱弌椡偡巇慻傒偱偁傞偑丄
偙偺僶僢僼傽偵婰壇壜擻側巆傝梕検偵憡摉偡傞忣曬偑栠傝抣偱偡丅
偙偺抣偼僽儘僢僋悢偱偡丅乮僶僢僼傽偼慡懱偺僽儘僢僋悢偑512偱丄1僽儘僢僋撪偼48byte偵側偭偰偄傑偡丅乯
|
|---|
| _RECIVE_USB_FUNC | 揹尮ON婲摦帪偵儅僋儘曄悢偵丄uint8_t傪堷悢偟偰壗傕偟側偄栠傝抣0偺僟儈乕娭悢偑婰壇偝傟偰偄傑偡丅
栠傝抣偑0偺応崌丄懕偄偰乽UME愱梡Hex僐儅儞僪乿偺夝愅丒幚峴張棟偵恑傒傑偡丅乮栠傝抣傪1偵偡傞偲丄乽UME愱梡Hex僐儅儞僪乿張棟傪偟傑偣傫乯
_RECIVE_USB_FUNC偵庴怣梡娭悢傪婰壇偝偣偰巊偄傑偡丅
//忋婰偺奺庬偺巊偄曽偺椺
int recive_usb(uint8_t d){
丒丒丒丒丒d偺庴怣偱屇偽傟傞丅
}
丒丒丒
_RECIVE_USB_FUNC = recive_usb; // 庴怣娭悢嶌偭偰丄偦偺娭悢傪搊榐偡傞偲丄庴怣偱偦偺娭悢偑屇傃弌偝傟傑偡丅
|
|---|
俙俢俠(Analog-to-digital converter)偺棙梡
CN8偲CN9偺僐僱僋僞偐傜擖椡偟偨僨乕僞偼丄偦傟偧傟2抜偺傾儞僾傪宱偰丄
乽AN0乿偲乽AN1乿偺AD僐儞僶乕僞擖椡抂巕偵宷偑傟偰偍傝 偙傟偑ADC偺擖椡懳徾偱偡丅
僨僼僅儖僩偱偼ADC偼丄乽AN0乿偲乽AN1乿傪岎屳偵僒儞僾儕儞僌偟偰偍傝丄堦偮偺僒儞僾儕儞僌偑Timer3偺廃婜偱寛掕偝傟傑偡丅
偙偺僒儞僾儕儞僌廃婜偼丄乽AN0乿偲乽AN1乿偺2暘偺僒儞僾儖廃婜偼丄PR3儗僕僗僞偺愝掕亊2偺抣偵側傝傑偡丅
弶婜抜奒偱Timer3偼OFF偵側偭偰偄傞偺偱丄 偙傟傪ON偵偡傞偲ADC傕楢摦偡傞傛偆偵側偭偰偄傑偡丅
ADC偺暘夝擻偼丄10bit偱偡偑16bit偺晞崋側偟惍悢偺忣曬偱丄1024屄偺僨乕僞偑拁偊偨屻偵 偦傟傪USB偱楢懕憲弌巇慻傒偑嶌傜傟偰偄傑偡丅
偦傟傪峴偆儅僋儘偑師偺傛偆偵梡堄偟偰偄傑偡丅
| 儅僋儘偺昞尰 | 奣梫 |
|---|
| _set_adc_mode(c,t) |
ADC偺懳徾偲USB偱弌椡偡傞嵺偺儌乕僪傪巜掕偡傞娭悢偱丄ADC僗僞乕僩慜偱巊偆丅
c:ADC僒儞僾儕儞僌懳徾偺僷儔儊僞
1: CN8 丄2: CN9 丄3: CN8偲CN9 (3偑僨僼僅僆儖僩抣)
t: USB偺僨乕僞弌椡儌乕僪僼儔僌丂1: TEXT MODE 丄 0 : BINARY MODE (0偑僨僼僅僆儖僩抣)
乮偙偺儅僋儘傪巊傢側偄偱壓婰_set_adc_exe傪巊偆偲丄2偮偺擖椡乮CN8偲CN9乯偐傜偺怣崋傪庢傝崬傒丄
僶僀僫儕儌乕僪偱弌椡偡傞偙偲偵側傞丅乯
|
|---|
| _set_adc_exe(n,f) |
ADC偺僗僞乕僩偲廔椆傪惂屼偡傞丅乮Timer3偺妱傝崬傒偑ON偱側偗傟偽丄ON偵側傝傑偡丅乯
n:1夞暘ADC僒儞僾儕儞僌僽儘僢僋悢僷儔儊僞
丂n偼1偐傜63傑偱偺僽儘僢僋悢乮1僽儘僢僋偑1024儚乕僪乯n偑2埲壓偺帪偺PR3偺嵟掅抣偼100掱搙偱丄
丂偙傟偼400KHz掱搙偺僒儞僾儕儞僌儗乕僩傪堄枴偟傑偡丅
f: 儖乕僾僼儔僌偱1偱忋婰僽儘僢僋偺僒儞僾儕儞僌傪孞傝曉偡丅
0偱忋婰僽儘僢僋僒儞僾儕儞僌屻偵廔椆偡傞丅
丂丂(婛偵摦嶌拞偵0偺巜掕偱屇傃弌偡偲丄n偼柍帇偝傟偰尰僽儘僢僋憲怣偱廔椆)
丂丂(婛偵摦嶌拞偵1偺巜掕偱屇傃弌偡偲丄n偼柍帇偝傟偰尰僽儘僢僋憲怣屻偵丄師偺僽儘僢僋悢傪n偱巜掕壜擻)
忋婰偺奺庬偺巊偄曽偺椺
PR3=1250-1;//堦偮僒儞僾儕儞僌廃攇悢傪 32KHz偵巜掕偡傞Timer3偺妱傝崬傒廃婜愝掕僷儔儊僞
// AN0,AN1偺俀偮傪僒儞僾儕儞僌偡傞偺偱丄幚幙揑偵16KHz偺僒儞僾儕儞僌廃婜偲側傝傑偡丅
_set_adc_mode(3,1);// CN8偺AN0偲CN9偺AN1傛傝傾僫儘僌僒儞僾儕儞僌偱弌椡僥僉僗僩儌乕僪
_set_adc_exe(2 , 0);// 2block, loop偟側偄1夞偩偗偺僒儞僾儕儞僌偱幚峴僗僞乕僩
忋婰偺墳摎偺僀儊乕僕傪帵偟傑偡丅
ADC_START
T1000
01FA020B01FC020B01FD020801EB020801EC020B01F1020E01F9020801FB0209
0207020B020B020A0210020D02170209020E020B01FE020701F9020A01FB0208
丒丒丒丒
021C020C021C020C02200203021C02090223020A0226020E0226020702270208
ADC_END
忋婰偺傛偆偵丄ADC_START偲ADC_END偱埻傫偩僨乕僞傪USB偱憲怣偟傑偡丅
偙偺拞偺愭摢峴偑僨乕僞偺憲怣僶僀僩悢傪堄枴偡傞16恑昞尰偱偡丅傛偭偰忋婰1000偼4096byte悢傪堄枴偟偰偄偡丅
(1block偑1024儚乕僪偱,巜掕偑2block偵傛傝X2偝傟傑偡丅傑偨CN8偲CN9偺俀擖椡偱X2偝傟丄1024亊2亊2=4096偺byte悢偱偡丅)
偙偺悢偺慜偵T偑晅偔応崌偑16恑暥帤楍偱憲怣偝傟傞偙偲傪堄枴偟丄T偑晅偐側偄応崌偽僶僀僫儕偱憲怣偝傟傞偙偲傪堄枴偟傑偡丅
忋婰偺傛偆偵丄16恑暥帤楍偺応崌偼丄1WORD偑4寘偺16恑偱丄1峴偑16WORD偛偲偵夵峴("\r\n")偱嬫愗傜傟傑偡丅
僶僀僫儕偺応崌偼儕僩儖僄儞僨傿傾儞偱1WORD偑2byte偱夵峴("\r\n")偱嬫愗傜傟傞偙偲偼偁傝偣傫丅
側偍ADC_START偺昞尰偼CN8(AN0)偲CN9(AN1)偺俀擖椡偺僒儞僾儕儞僌傪堄枴偟傑偡丅
偙偺帪偼丄CN8(AN0)偲CN9(AN1)偺WORD偑岎屳偵暲傫偱憲怣偝傟傑偡丅
ADC_START0偺昞尰偱偁傟偽CN8(AN0)偺1擖椡偺僒儞僾儕儞僌偱丄
ADC_START1偺昞尰偱偁傟偽CN9(AN1)偺1擖椡偺僒儞僾儕儞僌傪堄枴偟傑偡丅
偙偙傑偱偺忣曬偺庴怣偩偗偱丄屻弎偝傟傞僨乕僞偺堄枴偑暘偐傞傛偆偵側偭偰偄傞傢偗偱偡丅
|
|---|
| _UME_ENCODE_ADC_BUFF | 偙傟偼娭悢偺億僀儞僞偱丄AD僐儞僶乕僞偱摼傜傟偨忣曬偑強掕偺婰壇堟偑婰壇偝傟丄
師偙偺億僀儞僞偺娭悢傪屇傃弌偟偰偐傜丄USB傊偺弌椡偑峴傢傟傑偡丅
乮ADC_START偺弌椡張棟偺捈慜偱屇傃弌偝傟傑偡丅乯
偙偺娭悢傊偺億僀儞僞弶婜抣偼丄壗傕偟側偄偱偨偩栠傞娭悢偑婰壇偝傟偰偄傞偺偱丄
偙偺億僀儞僞傪抲偒姺偊傟偽丄偦偺娭悢偱AD僐儞僶乕僞偺寢壥傪壛岺偟丄偦傟偐傜弌椡偡傞偙偲偑偱偒傑偡丅
AD僐儞僶乕僞偱摼傜傟偨忣曬傪傾僋僙僗偡傞応崌偺億僀儞僞庢摼偵偼丄師偺_get_ptr_adc_buff儅僋儘傪巊偄傑偡丅
|
|---|
| _get_ptr_adc_buff() | AD僐儞僶乕僞偱摼傜傟偨忣曬傪傾僋僙僗偡傞応崌偺億僀儞僞庢摼儅僋儘偱偡丅
偙偺億僀儞僞偼丄common.h偱掕媊偝傟傞乽struct ADC_BUFF乿偺峔憿懱傪巜偟帵偡傕偺偱偡丅
AD僐儞僶乕僞偱摼傜傟偨忣曬偼丄偙偺峔憿懱儊儞僶adc_buffer0[idx_block]傗adc_buffer0[idx_block]偺攝楍偱偡丅
椺偊偽丄CN8(AN0)偺擖椡偱偁傟偽乽adc_buffer0[idx_block][0乣adc_buff_data_numb-1]偺撪梕偑ADC偺寢壥偺忣曬偱偡丅
UME_ENCODE_ADC_BUFF偵僙僢僩偡傞棙梡幰偺帺嶌娭悢偱丄偙偺攝楍撪梕偲憲弌悢偺adc_buff_data_numb儊儞僶忣曬傪曄峏偱偒傑偡丅
|
|---|
[UMEHOSHI IT] 偺UART惂屼
僨僼僅儖僩偱丄婲摦屻偺1昩偐傜1昩傑偱偺娫偵 UART偐傜壗偐傪庴怣偡傞偲丄
1夞偩偗"\r\n"傪UART偵憲怣偡傞巇慻傒偵側偭偰偄傑偡丅
傑偨丄偙偺婲摦屻偺2昩娫偼丄UART偐傜庴怣偟偨忣曬偼柍帇偝傟傑偡丅乮偙偺1夞偺墳摎偩偗偟傑偡乯
(偙傟偼U19偵ESP32-WROOM-32D傪巊偆応崌丄
僨僼僅儖僩偺ESP32-WROOM-32D偑僽乕僩儘僌偺弌椡偑孞傝曉偟偝傟傞忬懺偱丄偦傟傪巭傔傞張棟偵側偭偰偄傑偡丅
偱偡偑ESP32-WROOM-32D傪巊偭偰偄側偄応崌偱傕丄UART傪巊偭偰偄傞応崌丄偙偺婲摦屻2昩娫偺張棟偼摨偠偱偡)
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
| _init_uart1() | UART1偺巊偄曽傪巜掕偟傑偡丅
偙偺娭悢偱丄 115200bps,8bit,僷儕僥傿側偟,1屄偺僗僩僢僾價僢僩偱巊偆巜掕偵偟偰偄傑偡丅
妱傝崬傒儗儀儖傪巜掕偟偰偄傑偡偑丄妱傝崬傒嫋壜偼偟偰偄傑偣傫丅
偙偺弶婜壔娭悢偼丄婲摦帪偵_HANDLES[_IDX_INIT_UART1]傊婰壇偝傟丄偦傟偑幚峴偟偰偄傑偡丅
|
|---|
| _recv_uart1(c) | USB張棟偺儖乕僾拞偱屇傃弌偝傟傞億乕儕儞僌張棟撪偱丄
庴怣偑偁傟偽丄偦偺庴怣偟偨1byte偺僨乕僞傪堷悢c偵偟偰屇傃弌偟偰偄傑偡丅
偙傟偼丄_HANDLES[_IDX_RECV_UART1]偵婰壇偝傟傞儅僋儘偱丄
帺嶌娭悢傪戙擖偱曄峏偡傞偙偲偑偱偒傑偡丅
僨僼僅儖僩偱愝掕偝傟傞張棟偼丄庴怣偟偨c偺1byte傪USB傊憲怣偡傞張棟偵側偭偰偄傑偡丅
|
|---|
| _send_uart1(c) | _HANDLES[_IDX_SEND_UART1]偵婰壇偝傟傞儅僋儘偱偡丅
弶婜抣偱偼丄UART1傊偺憲怣僶僢僼傽偵c傪擖傟傞張棟偵側偭偰偄傑偡丅
惓偟偔僶僢僼傽偵僙僢僩偱偒傟偽侾丆僶僢僼傽僼儖偱僙僢僩偱偒側偗傟偽0傪曉偟傑偡丅
偙偺僶僢僼傽僼儖偺幐攕帪偼MY_UART_ERR_SND_SET 偺僄儔乕忣曬傪撪晹偱僙僢僩偝傟傑偡丅
|
|---|
| _send_string_to_uart1(s) | s偺暥帤楍傪UART1傊憲怣偟傑偡丅
撪晹揑偼丄忋婰偺send_uart1偺張棟偺孞傝曉偟偱幚尰偟偰偄傑偡丅 |
|---|
| _get_uart1_capacity() | 忋婰憲怣偼丄憲怣僨乕僞傪憲怣僶僢僼傽偵僙僢僩偡傞偙偲偱摦嶌偟傑偡丅
偦偟偰丄僶僢僼傽偑僼儖偱僙僢僩偑幐攕偡傞偲僄儔乕忬懺偵側傝傑偡丅
偦偟偰偙偺儅僋儘偼丄偙偺憲怣僶僢僼傽偵愝掕偱偒傞巆傝偺僶僀僩悢傪曉偟傑偡丅 |
|---|
| _request_acc_uartbuff(d) | 堷悢偱妱傝崬傒偵墳偠偨id傪巜掕傪偟丄忋婰UART1傊偺弌椡柦椷偺傾僋僙僗梫媮傪偟偰丄
庢摼偱偒偨傜1丄幐攕偱0傪曉偟傑偡丅乮id偼common.h偵婰嵹偝傟傞乽_ID_ACCESS_乣TASK乿偺幆暿巕偱偡乯 |
|---|
| _release_acc_uartbuff(d) | 忋婰偺_request_acc_uartbuff(id)偱摼偨傾僋僙僗尃傪奐曻偟傑偡丅乮栠傝抣側偟乯 |
|---|
| _my_app_tasks() | 僔僗僥儉撪晹偱偼APP_Tasks()娭悢偺屇傃弌偟偺孞傝曉偟偱摦嶌偟偰偄傑偡丅
偦偟偰丄偙偺拞偐傜屇傃弌偟偰偄傞偺偑丄乽僥僗僩丒僂儊丒僼儔僢僔儏乿愱梡偺暘婒張棟傪偡傞
_my_app_tasks()偺儅僋儘張棟偱偡丅
_my_app_tasks()偺億僀儞僞偺_HANDLES[_IDX_MY_APP_TASKS]傪曄峏偼壜擻偱偡偑丄
乽僥僗僩丒僂儊丒僼儔僢僔儏乿偺擻椡傪偦偭偔傝曄峏偡傞埲奜偱曄峏偡傞偙偲偼側偄偱偟傚偆丅
僷儚乕僆儞帪偵愝掕偝傟傞僨僼僅儖僩偺娭悢偱偼丄USB偐傜偺庴怣暥帤楍偱丄
乽UME愱梡Hex僐儅儞僪乿傪夝愅偟偰幚峴偟偰偄傑偡丅
傑偨偙偺拞偐傜壓婰偺UART偺僨僼僅儖僩億乕儕儞僌憲庴怣張棟偱偁傞壓婰偺_def_polls_uart()儅僋儘傪
幚峴偟偰偄傑偡丅
側偍丄僷儚乕僆儞帪偐傜俁昩宱偭偨僞僀儈儞僌偱SW2傪墴偡偲丄僗儖乕儌乕僪偵堏峴偟傑偡偑丄
偙偺曄峏偼丄_HANDLES[_IDX_MY_APP_TASKS]傪曄峏偡傞偙偲偱幚尰偟偰偄傑偡丅
乮僗儖乕儌乕僪偲偼USB偵憲偭偨忣曬偑UART偵憲傜傟丄媡偵UART偵憲偭偨忣曬偼USB偵憲傜傟傞忬懺乯
|
|---|
| _def_polls_uart() | 忋婰偺僨僼僅儖僩偺_my_app_tasks()撪偐傜屇傃弌偝傟傞UART1偺億乕儕儞僌張棟偱偡丅乮堦斒偵巊偆偙偲偑側偄僔僗僥儉棙梡儅僋儘偱偡乯
_HANDLES[_IDX_DEF_POLLS_UART]偺曄峏偱張棟撪梕傪曄峏偱偒傑偡偑丄弶婜偺僨僼僅儖僩偱偼
recive_and_send_uart_with_polling娭悢偑搊榐偝傟偰偄傑偡丅
捠忢儌乕僪偱偁傟偽偦偙偱UART1傛傝庴怣傪妋擣偟偨応崌偵_recv_uart1(庴怣僨乕僞)傪幚峴偟傑偡丅
傑偨丄UART1偺憲怣儗僕僗僞偵嬻偒偑崌偭偰憲怣僶僢僼傽偵僨乕僞嵼傞応崌偼庢傝弌偟偰
UART1偺憲怣儗僕僗僞偵愝掕偟偰偄傑偡丅
(UART1偺億乕儕儞僌張棟偺慡懱傪抲偒姺偊傞偨傔傕偺偱偡偑丄堦斒偵曄峏偡傞偙偲偼側偄偱偟傚偆丅)
|
|---|
| _cmd_polls_uart() | UART僐儅儞僪儌乕僪帪偺億乕儕儞僌娭悢偱偡丅乮堦斒偵巊偆偙偲偑側偄僔僗僥儉棙梡儅僋儘偱偡乯
僷儚乕僆儞帪偵丄SW1偲SW2傪墴偟偰丄SW1傪棧偟偰偐傜4昩埲忋屻偵SW2傪棧偡偲丄UART僐儅儞僪儌乕僪偵側傝傑偡偑丄
偙偺帪偵巊傢傟傞UART偺億乕儕儞僌張棟偑僷儚乕僆儞帪偵愝掕偝傟傑偡丅
偙偺張棟娭悢偺億僀儞僞偑_HANDLES[_IDX_CMD_POLLS_UART]偵婰壇偝傟偰偍傝丄
忋婰SW偺憖嶌帪偵ANDLS[_IDX_DEF_POLLS_UART]傪偙偺張棟偵抲偒姺偊偰偄傑偡丅
|
|---|
| _isr_polls_uart() | uart偺妱傝崬傒儕棙梡帪偺億乕儕儞僌張棟偱丄_HANDLES[_IDX_ISR_POLLS_UART]偵婰壇偝傟偰偄傑偡丅
僨僼僅儖僩偱偼妱傝崬傒傪巊偭偰偄傑偣傫偑丄妱傝崬傒僞儞僪儔偑掕媊嵪傒偱偡丅偦偟偰偦傟偵懳墳偺億乕儕儞僌娭悢偑
偙傟偱偡丅棙梡偡傞応崌偼丄_HANDLES[_IDX_DEF_POLLS_UART]傊_HANDLES[_IDX_ISR_POLLS_UART]傪愝掕偡傞
|
|---|
[UMEHOSHI IT] 偦偺懠偺惂屼
僔僗僥儉撪晹僾儘僌儔儉偺main偼丄師偺傛偆偵摦嶌偟傑偡丅
- init_main()娭悢幚峴偱丄儊儌儕娗棟弶婜愝掕偲init_handle_area()傪幚峴偡傞丅
init_handle_area()偺幚峴偱
丂_HANDLES偺攝楍偺僷儚乕僆儞弶婜壔偲丄_HANDLES[_IDX_HANDLE_USER_SET_FUNC]偺娭悢傪幚峴偟傑偡丅
丂乮_HANDLES[_IDX_HANDLE_USER_SET_FUNC]偼丄僨僼僅儖僩偱壗傕偟側偄dummy_function娭悢偵側偭偰偄傞丅乯
- SYS_Initialize ( NULL )娭悢偺幚峴偱丄MPLAB Harmony modules偺弶婜壔乮IO側偳偺弶婜壔乯傪峴偆丅
- init_interrupt()偺幚峴偱丄妱傝崬傒傗僴儞僪儔側偳偺弶婜壔傪峴偭偨屻丄
丂EEPROM撪婲摦娭悢偲丂_HANDLES[_IDX_INIT_SUB_FUNC] 偺娭悢傪幚峴偟傑偡丅
丂乮EEPROM撪婲摦娭悢偼丄0x9D020000斣抧偐傜幚峴偝傟傞丅乯
- 傾僾儕働乕僔儑儞梡儊僀儞儖乕僾乮SYS_Tasks();傪孞傝曉偡張棟乯偱丄USB娭楢偺張棟傪峴偆丅
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
_HANDLES[_IDX_HANDLE_USER_SET_FUNC]
|
忋婰偱愢柧偟偰偄傞傛偆偵丄init_handle_area()撪偐傜屇傃弌偝傟傞儐乕僓梡娭悢傪婰壇偡傞梫慺偱偡丅
僷儚乕僆儞偺弶婜抣偼丄壗傕偟側偄dummy_function娭悢偑搊榐偝傟偰偄傑偡丅
搊榐偟偨娭悢偼丄_handle_user_set_func()偺儅僋儘昞尰偱丄IO側偳偺弶婜壔偺婲摦慜偵屇傃弌偝傟傑偡丅
偙偺梫慺偵搊榐偡傞娭悢偱偼丄_HANDLES[婡擻斣崋]偺搊榐梫慺偺曄峏張棟傪峴偆栚揑偱梡堄偟偰偄傑偡丅
曄峏偟偨梫慺偼丄僷儚乕僆儞帪偵弶婜抣偵栠傝傑偡偑丄扨側傞儕僙僢僩偱偼栠傝傑偣傫丅
傛偭偰丄僷儚乕僆儞傪敽傢側偄儕僙僢僩偱摦嶌偡傞娭悢偺搊榐側偳偵巊偆偙偲傕偱偒傑偡丅
|
|---|
| _HANDLES[_IDX_INIT_SUB_FUNC] |
忋婰愢柧偺init_interrupt()撪偺嵟屻偱屇傃弌偝傟傞儐乕僓梡娭悢傪婰壇偡傞梫慺偱偡丅
僷儚乕僆儞偺弶婜抣偼丄壗傕偟側偄dummy_function娭悢偑搊榐偝傟偰偄傑偡丅
搊榐偟偨娭悢偼丄_init_sub_func()偺儅僋儘昞尰偱丄IO側偳偺弶婜壔偺婲摦屻偵屇傃弌偝傟傑偡丅
傛偭偰丄儊僀儞儖乕僾偵擖傞慜偵幚峴偟偨偄張棟傪搊榐偡傞栚揑偱巊偆偙偲偑偱偒傑偡丅
|
|---|
| _HANDLES[_IDX_INIT_CORE_TIMER] | 僐傾僞僀儅乕偺弶婜愝掕娭悢偺億僀儞僞偱丄忋婰愢柧偺init_interrupt();傛傝屇傃弌偝傟傑偡丅
僷儚乕僆儞帪偵丄弶婜壔梡僨僼僅儖僩娭悢乮撪晹僜乕僗偵偰init_core_timer_1偺娭悢乯偑婰壇偝傟傑偡丅
偙偺僨僼僅儖僩娭悢偱偼丄廃婜乮_UM_CP0_SET_COMPARE乯傗丄妱傝崬傒桪愭搙丄妱傝崬傒嫋壜側偳偺愝掕傪偟偰偄傑偡丅
|
|---|
| _HANDLES[_IDX_CORE_TIMER_FUNC] | 僐傾僞僀儅偺妱傝崬傒儖乕僠儞偐傜捈愙偵屇傃弌偝傟傑偡丅
僷儚乕僆儞帪偵丄僨僼僅儖僩僐傾僞僀儅偺張棟娭悢乮撪晹僜乕僗偵偰core_timer_umeFunc_1偺娭悢乯偑婰壇偝傟傑偡丅
偙偺僨僼僅儖僩娭悢偱偼丄_UM_CP0_SET_COMPARE儅僋儘曄悢偺廃婜偵側傞愝掕偲丄壓婰_HANDLES[_IDX_CORE_TIMER_SUB_FUNC]偺娭悢傪屇傃弌偟偰偄傑偡丅
乮_UM_CP0_SET_COMPARE偺弶婜抣偼 22727u偱0.00113635昩偺斀揮廃婜 440Hz偺廃攇悢乯
|
|---|
| _HANDLES[_IDX_CORE_TIMER_SUB_FUNC] | 忋婰偺_HANDLES[_IDX_CORE_TIMER_FUNC]偺僨僼僅儖僩娭悢偐傜屇傃弌偝傟傞娭悢億僀儞僞傪婰壇
僷儚乕僆儞帪偵丄僨僼僅儖僩張棟娭悢乮撪晹僜乕僗偵偰core_timer_sub_1偺娭悢乯偑婰壇偝傟傑偡丅
偙偺僨僼僅儖僩娭悢偱偼丄婲摦帪儌乕僪偺愗傝懼偊張棟丄壓婰_core_wait(t)梡曄悢偺僟僂儞僇僂儞僩丄僽僓乕偺怳摦偺ON/OFF惂屼丄SW2偺娔帇偑峴傢傟偰偄傑偡丅
戙擖偵傛傞曄峏偼壜擻偱偡偑丄扨弮偵曄峏偡傞偲偙傟傜偺張棟偑弌棃側偔側傝傑偡丅
|
|---|
| _core_wait(t) | 忋婰_HANDLES[_IDX_CORE_TIMER_SUB_FUNC]偺僨僼僅儖僩張棟傪棙梡偟偨懸偪娭悢
堷悢偺 t 偼丄_HANDLES[_IDX_CORE_TIMER_SUB_FUNC]偺孞傝曉偟悢傪巜掕偟丄偦偺夞悢暘偺帪娫偑宱夁偟偨傜儕僞乕儞偟傑偡丅
_HANDLES[_IDX_CORE_TIMER_SUB_FUNC]偺屇傃弌偟廃婜偼丄僐傾僞僀儅偺妱傝崬傒偲摨偠側偺偱丄懸偪帪娫偼_UM_CP0_SET_COMPARE偺愝掕抣偵埶懚偟傑偡丅
|
|---|
|
| _HANDLES[_IDX_INIT_TIMER_1] | Timer1偺妱傝崬傒偺弶婜壔娭悢偺億僀儞僞傪婰壇偟丄init_interrupt()張棟傛傝屇傃弌偝傟傑偡丅
僷儚乕僆儞帪偵婰壇偝傟傞僨僼僅儖僩娭悢乮撪晹僜乕僗偵偰init_timer_1偺娭悢乯偱偼丄0.5儈儕昩廃婜偵側偰偄傑偡偑丄Timer偺僗僞乕僩偼
愝掕偟偰偄傑偣傫丅偙傟偼僒僂儞僪偺僥儞億偵娭學偟偰偍傝丄妱傝崬傒廃婜偼丄set_switching_period(d)儅僋儘偱傕曄峏偱偒傑偡丅
|
|---|
| _HANDLES[_IDX_TIMER_1_FUNC] | Timer1偺妱傝崬傒張棟偐傜屇傃弌偝傟傑偡丅
僷儚乕僆儞帪偵婰壇偝傟傞僨僼僅儖僩娭悢乮撪晹僜乕僗偵偰timer1_umeFunc1_1偺娭悢乯偱偼丄僒僂儞僪嵞惗帪偺壒偺挿偝惂屼偑峴傢傟偰偄傑偡丅
|
|---|
| _set_int_var(p,v) | 巜掕曄悢偺曄峏丂乮丗202503 捛壛乯
巜掕偝傟偨 int 曄悢傪 v 偵愝掕偟傑偡丅偙偺曄悢偺巜掕曽朄偼丄戞1堷悢p偱師傪巜掕偑偱偒傑偡丅(奺巜掕偺堄枴傕帵偡乯
_SPECIFIED_flagEcho傪巜掕偟偨帪丄v傪1偵偡傞偲僄僐乕儌乕僪偵側傝丄0傪巜掕偡傞偲僄僐乕柍偟儌乕僪偵側傞丅
乮UART1僐儅儞僪儌乕僪偺帪偼丄UART1傪夘偟偨UME愱梡Hex僐儅儞僪擖椡偵懳偡傞墳摎偵傕揔梡偝傟傑偡乯
椺丂_set_int_var(SPECIFIED_flagEcho,0); 偲幚峴偡傞偲丄僄僐乕柍偟儌乕僪偵側傞丅
_SPECIFIED_uart_command_mode偲_SPECIFIED_mode_change_request傪巜掕偡傞p偺愝掕偼楢摦偟偰巊偄傑偡丅
_SPECIFIED_uart_command_mode偱乽捠忢儌乕僪乿傑偨偼乽UART僐儅儞僪儌乕僪乿傊偺曄峏傪梊栺偟偰丄
師偵偦偺曄峏梊栺傪幚峴偡傞巜掕偲偟偰_SPECIFIED_mode_change_request傪巊偄傑偡丅
嬶懱揑偵椺偊偽丄UART1僐儅儞僪儌乕僪偵曄峏偡傞応崌偼師偺傛偆偵幚峴偝偣傑偡丅
_set_int_var(_SPECIFIED_uart_command_mode,1); //UART僐儅儞僪儌乕僪傊偺曄峏梊栺
丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂丂//(戞2堷悢偑0偼捠忢儌乕僪傊偺梊栺)
_set_int_var(_SPECIFIED_mode_change_request,1); //忋婰愝掕傪懀偡偲曄峏偑幚峴偝傟傑偡丅
忋婰埲奜偱戞1堷悢p傪巜掕偟偨応崌丄p偺億僀儞僞偑巜偟帵偡int宆婰壇椞堟傪v偵曄峏偡傞張棟傪峴偄傑偡丅
|
|---|
[UMEHOSHI IT] 偺EEPROM惂屼
| 儅僋儘昞尰 | 摦嶌愢柧 |
|---|
| _nvm_erase_page(d) | d偺傾僪儗僗偱帵偡1儁乕僕(1024byte)偺EEPROM偺撪梕傪丄0xffffffff偵愝掕偡傞徚嫀梡儅僋儘丅
堷悢偱巜掕偡傞傾僪儗僗偼丄0x9D020000,
0x9D020400, 0x9D020800, 0x9D020c00, 0x9D021000, 丒丒丒丒,0x9D03E400, 0x9D03F800, 0x9D03FC00偺壗傟偐傪巜掕偡傞丅
乮懳徾儁乕僕偺byte傪慡偰0xff偵愝掕偟傑偡丅乯
側偍丄0x9D03E800,0x9D03EC00,偼偙偺晹暘偼__vector_dispatch偺椞堟偱徚嫀偟側偄偱偔偩偝偄丅
乮0x9D03F800,0x9D03FC00偺徚嫀偼壜擻偱偡乯
慡偰傪嶍彍偡傞僒儞僾儖僐乕僪偼偙偺儕儞僋乮erase.c乯傪嶲徠偔偩偝偄丅
|
|---|
| _nvm_write_word(a,d) | a偺傾僪儗僗乮0x9D020000乣0x9D03EC00乯偲乮0x9D03F800乣0x9D03FC00乯偱帵偡侾儚乕僪椞堟偵丄d偺儚乕僪乮32bit)傪彂偒崬傓
乮彂偒崬傒懳徾偺儚乕僪椞堟偼丄0xffffffff偵弶婜壔偝傟偰偄側偄偲丄惓偟偔彂偒崬傔傑偣傫丅乯
偺徚嫀偼壜擻偱偡乯
|
|---|
EEPROM 椞堟偺0x9D020000斣抧偵娭悢偑攝抲偟偰偁傞偲丄僷儚乕僆儞偱側偄儕僙僢僩乮愒偺SW1乯偱0x9D020000斣抧偺娭悢偑幚峴偟傑偡丅
乮偙偺斣抧撪梕偑0xffffffff偺徚嫀忬懺偱偁傟偽丄屇傃弌偟偟側偄傛偆偵側偭偰偄傑偡丅乯
偙傟偼 揹尮傪嫙媼偺屻偱丄愒偺SW1傪墴偡偛偲偵丄婓朷偺張棟傪幚峴偝偣傞傛偆側摦嶌傪峴傢偣傞応崌偵巊偄傑偡
僷儚乕僆儞儕僙僢僩偱側偄儕僙僢僩偺嶲峫椺偼偙偪傜偱偡丅
傑偨僷儚乕僆儞偱幚峴偝偣傞娭悢偼丄2捠傝偁傝傑偡丅
偦傟偼丄僷儚乕僆儞帪偵SW2(敀)僗僀僢僠偑墴偝側偄応崌丄偲SW2僗僀僢僠傪墴偟偨応崌偵幚峴偱幚峴偝偣傞曽朄偺2捠傝偱偡丅
僷儚乕僆儞帪偵SW2(敀)僗僀僢僠偑墴偝側偄応崌偼丄0x9D03fff0斣抧偵婰壇偝傟傞撪梕偺傾僪儗僗愭偺娭悢傪幚峴偟傑偡丅
僷儚乕僆儞帪偵SW2(敀)僗僀僢僠偑墴偟偨応崌偼丄丂0x9D03fff4斣抧偵婰壇偝傟傞撪梕偺傾僪儗僗愭偺娭悢傪幚峴偟傑偡丅
椉幰偲傕懳徾斣抧撪梕偑0xffffffff偺応崌偼丄屇傃弌偝側偄傛偆偵側偭偰偄傑偡丅
婎杮揑丄偳偪傜偐堦曽偩偗傪巊偆曽朄傪偍姪傔偟傑偡丅壖偵EEPROM偵嶌偭偨娭悢偵晄嬶崌偑偁偭偨応崌丄
SW2僗僀僢僠憖嶌偱娭悢幚峴傪巭傔偰丄0xffffffff偵徚嫀梡偡傟偽丄尦偺偺忬懺偵暅婣偱偒傞偐傜偱偡丅
僷儚乕僆儞儕僙僢僩偱SW2(敀)僗僀僢僠偑墴偝側偄応崌偺嶲峫椺偼偙偪傜偱偡丅
乽UME愱梡Hex僐儅儞僪乿偺嶌惉曽朄乮僐儅儞僪徻嵶忣曬丄python偱惗惉偡傞椺)
乽UME愱梡Hex僐儅儞僪乿偺摿庩側僠僃僢僋僒儉偵偮偄偰
UMEHOSHI ITA偱巊偆乽UME愱梡Hex僐儅儞僪乿偺僠僃僢僋僒儉偺晅壛偺僐乕僪偺嶼弌椺傪帵偟傑偡丅
"R00800050000061"偼丄0x80005000斣抧偵偁傞娭悢傪屇傃弌偡僐儅儞僪暥帤楍偱偡丅
偙傟偼"R008000500000"偺暥帤楍偵懳偟偰丄"61"偑僠僃僢僋僒儉偺晹暘偱偡丅
偙偙偵偼丄"R008000500000"偺奺暥帤僐乕僪偺憤榓亄僠僃僢僋僒儉偺16恑2暥帤偑昞偡0乣255亖0偲側傞娭學偑偁傝傑偡丅
python偱偁傟偽丄師偺傛偆偵嶼弌偱偒傑偡丅
s="R008000500000" # 僠僃僢僋僒儉傪娷傑側偄暥帤楍
total = sum([ord(c) for c in s])
checksum = (0x100-total) & 0x0ff
print( s + f"{checksum:02X}" ) # 僠僃僢僋僒儉傪晅壛偟偨暥帤楍
0x80005000斣抧偵
偁傞娭悢傪屇傃弌偡僐儅儞僪暥帤楍偺"R00800050000061"偼丄"R00" + "80005000" + "00" + "61" 偺楢寢偱偡丅
偁傞傾僪儗僗偺娭悢傪屇傃弌偡僐儅儞僪暥帤楍偺愭摢偼
"R00"偱丄師偑[俉屄偺16恑戝暥帤偱昞尰偝傟偨幚峴傾僪儗僗偺昞尰]丄
師偑"00"丄師偑僠僃僢僋僒儉偱偡丅
丂忋婰椺乮0x80005000乯偺幚峴傾僪儗僗偼儐乕僓乕僾儘僌儔儉傪攝抲偱偒傞RAM椞堟偺愭摢傾僪儗僗偱丄RAM偵僾儘僌儔儉傪嶌傞応崌偵傛偔巊偄傑偡丅
師偼丄
儊儌儕撪梕偺庢摼偺椺傪帵偟傑偡丅
[9D020000]斣抧偐傜10byte偺儊儌儕撪梕偺庢摼偺僐儅儞僪暥帤楍偺"G0A9D0200000049"偼丄"G" + "0A" + "9D020000" + "00" + "49" 偺楢寢偱偡丅
儊儌儕撪梕偺庢摼偼僐儅儞僪暥帤楍偺愭摢偼
"G"偱丄師偺2暥帤偑僶僀僩悢傪16恑偱昞尰丄師偑[俉屄偺16恑戝暥帤偱庢摼偟偨偄儊儌儕傾僪儗僗偺昞尰]丄
師偑"00"丄師偑僠僃僢僋僒儉偱偡丅
丂側偍丄忋婰偺庢摼傾僪儗僗乮0x9D020000乯偼丄儕僙僢僩SW偱婲摦偡傞帪偺EEPROM撪偺僗僞乕僩埵抲偱偡丅
師偼丄
儊儌儕偵侾儚乕僪偺僨乕僞傪愝掕偡傞椺傪帵偟傑偡丅
[9D03FFF4]斣抧偵[9D021000]偺侾儚乕僪(
4byte)傪愝掕偡傞僐儅儞僪暥帤楍偺"S
049D03FFF4000010029D63"偼丄
"S" + "
04" + "9D03FFF4" + "00" + "0010029D" + "63" 偺楢寢偱偡丅
儊儌儕偺愝掕僐儅儞僪暥帤楍偺愭摢偼
"S"偱丄師偺2暥帤偑愝掕僶僀僩悢傪16恑偱昞尰丄 師偑[俉屄偺16恑戝暥帤偱庢摼偟偨偄儊儌儕傾僪儗僗偺昞尰]丄
師偑"00"丄師偑[愝掕儚乕僪偱俉屄偺16恑戝暥帤偱暲傃偼
儕僩儖僄儞僨傿傾儞]丄師偑僠僃僢僋僒儉偱偡丅
偙偙偱愝掕儚乕僪偑0x9D021000偺応崌丄byte扨埵偺暲傃偑媡偵側傞偺偱丄"0010029D"偲側傝傑偡丅
丂偙偺椺偺愝掕傾僪儗僗偺0x9D03fff4斣抧偼丄僷儚乕僆儞帪偵SW2(敀)僗僀僢僠偑墴偟偨帪偵幚峴偡傞傾僪儗僗傪婰壇偡傞埵抲偱偡丅
埲忋偺傛偆偵丄UMEHOSHI ITA偺UME愱梡Hex僐儅儞僪暥帤楍乮幚峴丄庢摼丄愝掕偺俁庬椶乯偺惗惉偼僠儑僢僩柺搢偱偡丅
偦偙偱 僨乕僞傪僉乕擖椡偡傟偽丄懳墳偡傞UME愱梡Hex僐儅儞僪暥帤楍傪昞帵偟偰偔傟傞python僐乕僪乮printUmeHex.py乯傪丄師偺傛偆偵梡堄偟傑偟偨丅
def get_sum(s):
total = sum([ord(c) for c in s]) & 0x0ff
checksum = (0x100-total) & 0x0ff
return s + f"{checksum:02X}"
s=input("UME愱梡Hex僐儅儞僪偺庬椶慖戰[R:幚峴 / G:庢摼 / S:愝掕]亜").upper()
if s == 'S':
adr=('00000000' + input("愝掕偡傞婰壇堟傾僪儗僗偺16恑暥帤楍亜"))[-8:]
data=input("愝掕偡傞侾儚乕僪偺16恑暥帤楍乮8暥帤乯亜")
s=f"S04{adr}00{data[6:]}{data[4:6]}{data[2:4]}{data[0:2]}"
elif s == 'G':
adr=('00000000' + input("庢摼偡傞婰壇堟傾僪儗僗偺16恑暥帤楍亜"))[-8:]
numb=int( input("庢摼僶僀僩僒僀僘偺16恑暥帤楍:"), 16)
s=f"G{numb:02X}{adr}00"
elif s == 'R':
adr=('00000000' + input("幚峴偝偣傞傾僪儗僗偺16恑暥帤楍亜"))[-8:]
s=f"R00{adr}00"
print( get_sum(s) ) # s偺堷悢偼丄僠僃僢僋僒儉傪彍偄偨UME愱梡Hex僐儅儞僪偱丄昞帵偼僠僃僢僋僒儉傪娷傓僐儅儞僪暥帤楍
埲壓偼僐儅儞僪僾儘儞僾僩偱丄
[9D03FFF4]斣抧偵[9D021000]偺侾儚乕僪(
4byte)傪愝掕偡傞僐儅儞僪暥帤楍傪昞帵偝偣傞幚峴椺偱偡丅
R:\>python printUmeHex.py
UME愱梡Hex僐儅儞僪偺庬椶慖戰[R:幚峴 / G:庢摼 / S:愝掕]亜S
愝掕偡傞婰壇堟傾僪儗僗偺16恑暥帤楍乮8暥帤乯亜9D03FFF4
愝掕偡傞侾儚乕僪偺16恑暥帤楍乮8暥帤乯亜9D021000
S049D03FFF4000010029D63
R:\>