このページで示した[Raspberry Pi]のサービスのstart-app-select.pyから,
DIPスイッチ0b10??の状態で呼び出されるraspiAPumeTest.pyのコードです。
また、これで使うハードとその動作確認コードは、このリンク先でで紹介しています。
なお、EEPROMの内容は、このページで作成した内容を使っています。
この資料の続きは、このリンクで紹介しています。
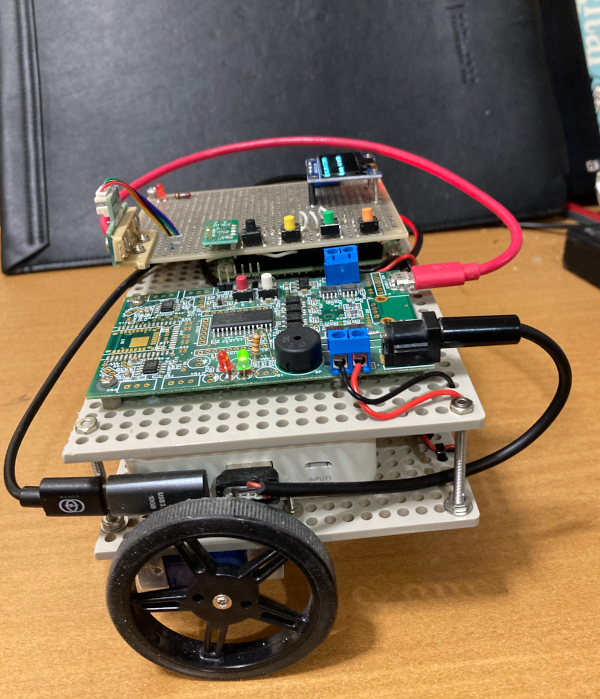
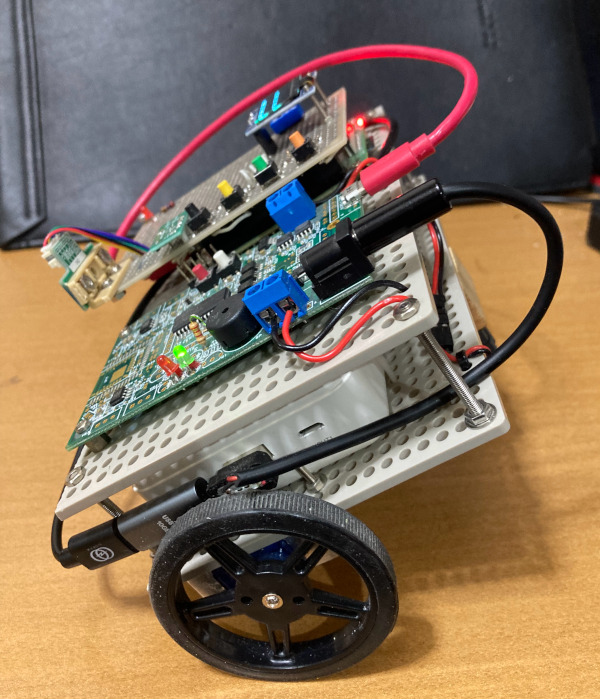
| 接地安定状態 | 目標となる二輪車だけの倒立制御状態 |
|---|---|
|
|
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# TCPサーバープログラム(/usr/local/apps/raspiAPumeTest.py)
# [Raspberry Pi 3 Model A+]と[UMEHOSHI ITA]を乗せたモータ付き台車のサービスから呼び出される
# 倒立振子を試すコード
import subprocess
import os # ファイル有無を調べるため追加 ★
def exists(path):
try:
os.stat(path)
return True
except (OSError, AttributeError):
# ファイルが存在しない、またはos.statが使えない場合にFalseを返す
return False
# ---- LED用の出力とタクトスイッチ用入力 のためのGPIO初期化-----
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(21, GPIO.OUT) # GPIO21を出力に設定
GPIO.output(21, GPIO.HIGH) # ON(3.3V)
for no in [6, 16, 17]:
GPIO.setup(no, GPIO.IN, pull_up_down=GPIO.PUD_UP) # プルアップ付き入力
#------ GPIO初期化 終了 -------------------------------------
import signal # システムが閉じることを判断するため追加 ★
import board
import busio
from adafruit_ssd1306 import SSD1306_I2C # SSD1306ディスプレイ用
import adafruit_vl53l1x # VL53L1X使用 レーザー測距センサーモジュール用
# オープンソースハードウェアの設計・製造・販売を行うアメリカの企業のAdafruit(エイダフルート)モジュール利用
from PIL import Image, ImageDraw, ImageFont
import time
i2c = busio.I2C(board.SCL, board.SDA)# --- I2C初期化 ---
# --- SSD1306ディスプレイ初期化 (128x64の場合) -----------
oled = SSD1306_I2C(128, 64, i2c)
oled.contrast(128) # 0?255
oled.fill(0) # --- クリア
oled.show() # ---表示
# --- Pillowで描画領域を作成 ---
image = Image.new("1", (oled.width, oled.height))
draw = ImageDraw.Draw(image)
font = ImageFont.load_default()# --- フォント設定 ---
def draw_text(txt: str, row=0, showFlag = True, newImageFlag = False, font=font, fill=255):
global image,draw
if newImageFlag:
image = Image.new("1", (oled.width, oled.height)) # イメージ作り直し(全体クリア)
draw = ImageDraw.Draw(image)
# --- テキスト描画 (0=黒、255=白)上記設定で、横21文字---
draw.text((0, row*15), txt , font=font, fill=255)
# --- 画面に表示 ---
oled.image(image)
if showFlag: oled.show()
draw_text(f"UMEHOSHI ITA",0)
# 9軸センサー BNO055 制御 ---------------------------------------------------
import smbus # I2C通信をPythonから簡単に扱うためのモジュール
import os
# BNO055 の初期化
BNO055_ADDRESS = 0x28 # BNO055のI2Cアドレス(ADRピンがGNDなら0x28、VDDなら0x29になります)
BNO055_OPR_MODE = 0x3D # 動作モードを設定するためのレジスタ
BNO055_EULER_H_LSB = 0x1A # オイラー角(方位・ロール・ピッチ)のデータが始まるアドレス
bus = smbus.SMBus(1)# 引数の1でRaspberry PiのボードGPIO2: SDA、GPIO3: SCLを指定
bno055_calib_bin_path="/usr/local/apps/bno055_calib.bin" # キャリブレーションデータファイルパス
# このキャリブレーションデータファイルが存在しなければ、作成する。
try:
os.stat(bno055_calib_bin_path) # ファイルが存在しない場合は、エラー
except OSError:
bus.write_byte_data(BNO055_ADDRESS, BNO055_OPR_MODE, 0x00) # 設定変更(OPR_MODE)でCONFIGモードに切り替える
time.sleep(0.05)
# センサーをリセット(0x3FのSYS_TRIGGERレジスタのビット7をセット)
bus.write_byte_data(BNO055_ADDRESS,0x3F, 0x20)
time.sleep(0.7) # リセット後は再起動まで時間がかかる
# 出力単位(UNIT_SEL)を設定(0x00で「角度=度(°)」単位)
bus.write_byte_data(BNO055_ADDRESS,0x3B, 0x00)
# センサーフュージョンを有効にするNDOFモードに変更
bus.write_byte_data(BNO055_ADDRESS,BNO055_OPR_MODE, 0x0C) # NDOFモードへ
time.sleep(0.05)
while True: # NDOFモードで全てのセンサー(SYS, GYR, ACC, MAG)が 3 になるまで動かす。
cal = bus.read_byte_data(BNO055_ADDRESS, 0x35)
sys = (cal >> 6) & 0x03
gyr = (cal >> 4) & 0x03
acc = (cal >> 2) & 0x03
mag = (cal >> 0) & 0x03
draw_text(f"bno055 NDOF Calibrating...",0, showFlag = False,newImageFlag = True) # キャリブレーションの開始
draw_text(f"SYS:{sys}, GYR:{gyr}, ACC:{acc}, MAG:{mag}", 1)
time.sleep(0.5)
if sys == 3 and gyr == 3 and acc == 3 and mag == 3 : break # キャリブレーション完了?
# 各値が 3 になれば完全キャリブレーション完了です
#
calib_data = bus.read_i2c_block_data(BNO055_ADDRESS, 0x55, 22)
with open(bno055_calib_bin_path, "wb") as f:
f.write(bytearray(calib_data)) # オフセット値を読み出して保存
#
draw_text(f"End Calibration",2) # キャリブレーションデータファイル作成終了
# オフセット調整(センサーの取り付け位置や方向を自動補正)
bno055_offset_path="/usr/local/apps/bno055_offset.txt"
# 上記ファイル内に X軸が北を向く時にHeading、水平に置いた時にRollと Pitchが記憶される
make_offset_mode=False # "bno055_offset.txt"オフセット調整ファイル作成モード
try:
with open(bno055_offset_path, "r") as fr:
s = fr.readline() # 一行読み取り(改行を含めて)
draw_text(f"bno055 offset setting",0,newImageFlag = True)
a = s.split(",")
heading_offset = float(a[0]) # オフセット調整値取得
roll_offset = float(a[1])
pitch_offset = float(a[2])
print(f"offset value heading:{heading_offset}, roll:{roll_offset}, pitch:{pitch_offset}")
except:
make_offset_mode = True # bno055_offset.txtのオフセット調整作成モード
bus.write_byte_data(BNO055_ADDRESS, BNO055_OPR_MODE, 0x00) # 設定変更(OPR_MODE)でCONFIGモードに切り替える
time.sleep(0.05)
with open(bno055_calib_bin_path, "rb") as f:
calib_data = list(f.read(22)) # 別途bno055_calib_write.pyで行ったキャリブレーションの記憶ファイルを読む
# 設定モードへ
bus.write_byte_data(BNO055_ADDRESS, 0x3D, 0x00)
time.sleep(0.025)
# キャリブレーションデータを書き込んで、調整情報を復元
bus.write_i2c_block_data(BNO055_ADDRESS, 0x55, calib_data)
# NDOFモードに戻す
bus.write_byte_data(BNO055_ADDRESS, 0x3D, 0x0C)
time.sleep(0.05)
# 出力単位(UNIT_SEL)を設定(0x00で「角度=度(°)」単位)
bus.write_byte_data(BNO055_ADDRESS,0x3B, 0x00)
def to_signed(val):
"""16ビット値を符号付き整数に変換"""
if val >= 0x8000:
val -= 0x10000
return val
prev1_Pitch = 0 # 前のPitchの測定値
prev2_Pitch = 0 # 前のPitchの測定値
prev3_Pitch = 0 # 前のPitchの測定値
def read_euler():
''' make_offset_modeがTrueの場合は、現在の
heading:左右への向き, roll:左右の傾き, pitch:上下の傾きを返す。
make_offset_modeがFalseの場合は、調整過程のheading, roll, pitchを返す'''
#
global prev1_Pitch,prev2_Pitch,prev3_Pitch # 前のPitchの測定値
data = bus.read_i2c_block_data(BNO055_ADDRESS, BNO055_EULER_H_LSB, 6)
# 各要素が 1 バイト(0~255)の整数を6個のリストで得られる。(1 LSB = 1/16 度)
# データはリトルエンディアン形式(下位→上位の順)
heading = (data[1] << 8) | data[0] # 方位角(北基準のYAW)
roll = (data[3] << 8) | data[2] # ロール角(左右の傾き)
pitch = (data[5] << 8) | data[4] # ピッチ角(前後の傾き)
# ロールとピッチは符号付き
roll = to_signed(roll)
pitch = to_signed(pitch)
# スケーリング(1 LSB = 1/16 度)
heading = heading / 16.0 #
roll = roll / 16.0
pitch = pitch / 16.0
if make_offset_mode == False: #オフセット調整処理
# X軸が北を向く時にHeadingが0、水平に置いた時にRollと Pitchが0になるオフセット調整
heading = heading - heading_offset # headingズレ補正
heading = heading if heading >= 0 else heading + 360
roll = roll - roll_offset # rollズレ補正
if roll > 90:
roll = -(90 - roll)
elif roll < -90:
roll = -(-90 - roll)
pitch = pitch - pitch_offset # pitchズレ補正
if pitch > 180:
pitch = -(360 - pitch)
elif pitch < -180:
pitch = -(-360 - pitch)
#
prev3_Pitch = prev2_Pitch # 前の測定値記憶
prev2_Pitch = prev1_Pitch # 前の測定値記憶
prev1_Pitch = pitch # 前の測定値記憶
return heading, roll, pitch # 左右への向き, 左右の傾き, 上下の傾きを返す
if make_offset_mode: #オフセット調整処理
count = 100 # ロボットを水平にしてはX軸が北を向いてから安定に必要な予想回数
while True:
h, r, p = read_euler()
print(f"Heading: {h:7.2f}, Roll: {r:7.2f}, Pitch: {p:7.2f}")
count -= 1
print(f" {count}が0になるまでに、ロボットを水平にしてはX軸が北を向くように置いてください。")
draw_text(f"Before CountReaches 0",0,showFlag = False, newImageFlag = True)
draw_text(f"Place it horizontally",1,showFlag = False)
draw_text(f" and point it north",2,showFlag = False)
draw_text(f" count:{count}",3)
time.sleep(0.2)
if count <= 0:
with open(bno055_offset_path, "w") as fw:
fw.write(f"{h},{r},{p}\n") # オフセット調整データ書き込み
heading_offset, roll_offset,pitch_offset=h,r,p
break # 上記でX軸が北を向く時にHeading、水平に置いた時にRollと Pitchを記憶
# --------------------------------------------------------------------------------
vl53 = adafruit_vl53l1x.VL53L1X(i2c)# VL53L1X使用 レーザー測距センサーモジュール初期化
print("VL53L1X Start measuring...")
vl53.start_ranging()
distance = vl53.distance
time.sleep(0.5)
print(f"Distance: {distance} mm")
# umetcp umeusb 通信関連----------------------------------------------------
import os
import umetcp
from umetcp import send_message, receiveData
import socket
import umeusb
import traceback
sock = None # クライアントと通信するソケット
def my_tcp_receive_file_func(filepath):
''' 受信したumehoshiアプリ用「.umh」のファイルより、
「UME専用Hexコマンド」の文字列をusbへ出力する'''
name,ext = os.path.splitext(filepath)
if not ext == ".umh" : return
with open( filepath ) as f: ss=f.readlines()
ss="".join(ss[1:])
print(ss)
umeusb.send_cmd(ss, quantity=0) # TCPで受信した 「.umh」データを[UMEHOSHI ITA]へ送る
umetcp.tcp_receive_file_func = my_tcp_receive_file_func # tcpファイル受信データの処理を置き換え
def my_tcp_recieve_message(msg):
if msg.startswith("G:"):
file_path = msg[2:]
if exists(file_path):
umetcp.send_file(sock, file_path)
else:send_message(sock, f"G:{file_path}Not Operation\n")
else: umeusb.send_cmd(msg)
umetcp.tcp_receive_message_func=my_tcp_recieve_message # TCO受信文字列(UME専用Hexコマンド)処理を置き換え
def my_usb_receive_func(bin):
'usb受信のイベントで実行するデフォルト処理'
global sock
#print("-----------",bin)
ss = bin.decode('utf-8')
a=ss.split('\n')
for s in a:
s = s.strip()
if s == "": continue
if sock != None:
print(f"USB receive:{s}")
send_message(sock, s) # [UMEHOSHI ITA]からの応答メッセージをTCPで返す
else: print( f"USB receive:{s}" )
umeusb.usb_receive_func = my_usb_receive_func # USB受信データの処理を置き換える。
umeusb.init_sub()
import threading
t_id = threading.Thread(target=umeusb.read_loop)
t_id.start()
#ip="192.168.4.1"
ip=umetcp.get_wlan0_ip() # IPアドレス取得
while ip == None:
ip=umetcp.get_wlan0_ip()
if ip : break
time.sleep(0.1)
umeusb.send_cmdfile("/usr/local/apps/uStartInit.umh") # ロボット初期化("R009D020010004E")
server_addr =(umetcp.get_wlan0_ip(), 59154)
hostname=socket.gethostname()
print("Serverの情報:",hostname, server_addr)
def info_show2( pitch , target_angle):
''' IPアドレスpとポート番号の情報と、ピッチ角度、目標角度をSSD1306ディスプレイに表示する'''
draw_text(f"{server_addr[0]},{server_addr[1]}",0,showFlag = False, newImageFlag = True)
draw_text(f"Pitch:{pitch:5.1f} {target_angle}",2,showFlag = True)
# # ピッチなどの計測と、その制御ループ----------------------------------------------------------
measure_loop_flag=True # ピッチなどの計測と、その制御ループを続けるためのフラグ
def measure_loop():
global measure_loop_flag # 測定監視ループフラグ
next_measure_time=0 # 測定間隔制御用(次の測定の時間を記憶する)
flag_push = False # 倒立制御開始ボタンが押されてから倒立制御を終えるまでTrue
flag_control = False # 倒立制御中である間だけTrue
flag_fail = False # 制御失敗か?
start_control_time=0 # 制御開始の時間(秒)
start_forward_time = 1.0 # 制御開始前のモータ前進を行う期間(秒)
target_angle=23.5 # 目標角度 15→ 20→ 25← 23→
deadband = 1.0 # デッドバンド
time_now=0 # 現在の測定時間
time_bak=0 # 一つ前の測定時間
fw = None
#
while measure_loop_flag:
if GPIO.input(6) == GPIO.LOW: # SW2スイッチ(緑)が押された? リブート処理------------
draw_text(f"Rebooting.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
measure_loop_flag=False
os.system("sudo reboot") # OSにリブートコマンドを送信
sock.close()
break
#
if GPIO.input(17) == GPIO.LOW: # SW4スイッチ(黒色)が押された? 制御終了-----------
flag_push = False
flag_control = False
if fw and fw.closed == False:
fw.write('End\n')
fw.close() # 保存終了
fw = None
#
if next_measure_time > time.time():
continue # 次の周期まで待つ
time_bak=time_now
time_now=time.time()
next_measure_time = time_now + 0.0002 # 次の測定時間を更新
#
if flag_push==False and GPIO.input(16) == GPIO.LOW: # 制御開始用SW3スイッチ(黄色)が押された?
time.sleep(2)
fw = open('/usr/local/apps/log.txt', 'w')
start_control_time = time.time() # 制御スタート時間
flag_push = True
#
heading, roll, pitch = read_euler() # ジャイロ測定測定
if flag_push == False : info_show2(pitch,target_angle) # 測定値の表示
#
if flag_push and flag_control == False: # 倒立制御に入る前の処理
if time.time() < start_control_time + start_forward_time:
umeusb.usb_send("R009D020200004D", quantity=0) # Forward 最初の助走
#umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
else:
umeusb.usb_send("R009D020300004C", quantity=0) # Back 最初の倒立のための逆転
fw.write(f'B:{time_now-time_bak} pitch:{pitch}\n')
if pitch > target_angle: # 倒立角度に達した?
flag_control = True
fw.write(f'S:{time_now-time_bak} pitch:{pitch}\n')
#
if flag_control: # 倒立振子制御中
if pitch > target_angle + deadband:
umeusb.usb_send("R009D020200004D", quantity=0) # Forward
fw.write(f'F:{time_now-time_bak} pitch:{pitch}\n')
elif pitch < target_angle - deadband:
umeusb.usb_send("R009D020300004C", quantity=0) # Back
fw.write(f'B:{time_now-time_bak} pitch:{pitch}\n')
else:
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
fw.write(f'S:{time_now-time_bak} pitch:{pitch}\n')
#
if time.time() > start_control_time + 3: #この時間で制御を終了
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
flag_push = False
flag_control = False
if fw and fw.closed == False:
fw.write('End\n')
fw.close() # 保存終了
fw = None
#
#
#info_show() # ディスプレイへ表示
t_id2 = threading.Thread(target=measure_loop)
t_id2.start()
# 終了時に実行したい処理 ★
def handle_shutdown(signum, frame):
global measure_loop_flag
if measure_loop_flag == False: return
print(f"シャットダウンを検知しました (Signal: {signum})")
measure_loop_flag = False
draw_text(f"Wait....",0,showFlag = True, newImageFlag = True)
time.sleep(10)
draw_text(f"Shutdown.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
# SIGTERM(システム終了時の標準信号)を登録 ★
signal.signal(signal.SIGTERM, handle_shutdown) # ★
# TCPサーバー起動処理
try:
serversock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
serversock.bind(server_addr) # IPとポート番号を指定します
print(f"{server_addr}:接続要求を待つ")
serversock.listen()
except : serversock = None
while serversock != None:
print("接続を待って、接続してきたら許可")
sock, address = serversock.accept()#サーバの接続受け入れ
print("接続相手:",address)
try:
receiveData( sock ) # 受信ループ
except Exception as e:
print(f"例外の種類: {type(e)}")
print(f"スタックトレース: {traceback.format_exc()}")
draw_text(f"wait next",0,showFlag = True, newImageFlag = True)
sock.close()
単純に「Pitch < target_angle」であれば逆転させて、「Pitch > target_angle」であれば正転させるだけの制御では、
振動が収まり難くオーバーシュートを繰り返すことが多い。if pitch > target_angle + deadband: 前進の命令をUSBでUMEHOSHI ITAに送る。 elif pitch < target_angle - deadband: 後進の命令をUSBでUMEHOSHI ITAに送る。 else: 停止の命令をUSBでUMEHOSHI ITAに送る。このような手法は、「Bang-Bang制御」と呼ばれます。
import numpy as np
import matplotlib.pyplot as plt
ts=[] # 測定時間
pitchs=[] # 上記規則時のロボット角度
pwm=[] # 上記規則時のモータモータ制御に使ったPWMの大きさ(正転、逆転、停止)
fr = open('log.txt', 'r')
line = fr.readline()
timing=0
while line != '':
i=line.find(" ")
if line.startswith('B:') or line.startswith('F:') or line.startswith('S:'):
flag=line[0]
if timing == 0:
timing = float(line[2:i])
else:
timing += float(line[2:i])
ts.append(timing)
i+=len('pitch:')+1
pitch=float(line[i:])
pitchs.append(pitch)
print(f"{timing} {pitch} {flag} ")
#
if line.startswith('B:'):
pwm.append(-0x04*5) # 逆転設定のPWNの表示用相対値
elif line.startswith('F:'):
pwm.append(0x04*5) # 正転設定のPWNの表示用相対値
elif line.startswith('S:'):
pwm.append(0) # モータ停止の値
line = fr.readline()
fr.close()
fig = plt.figure() # ◎ファイル保存の準備
plt.plot(ts,pitchs)
plt.plot(ts,pwm, linestyle="--")
plt.xlabel("time")
plt.ylabel("pitch")
plt.title("")
plt.legend() # グラフ内にも上記のlabel表示をつける
# plt.grid() # グリッドの表示
fig.savefig("img.png")# ◎表示イメージのファイル保存
plt.show() #画面に表示して閉じるまで待つ
下記は、上記の実行で得られたイメージです。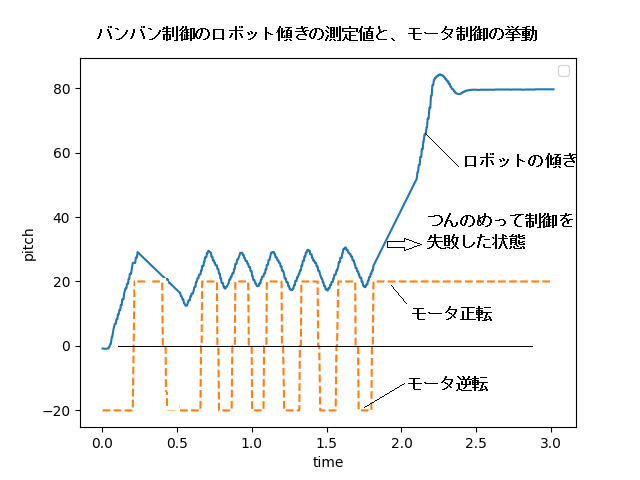
#include <xc.h> // pwm_pi3ma_init.c
#include "common.h"
#define BASE_FUNC 0x9D020000 // EEPROM領域配置用(パワーONでないリセット操作の実行アドレス)
#define AdrStart (BASE_FUNC+0x0010) // アプリの起動時の初期ルーチンのアドレス
#define AdrForward (BASE_FUNC+0x0200) // モータ前進ルーチンのアドレス
#define AdrGoBack (BASE_FUNC+0x0300) // モータ後進ルーチンのアドレス
#define AdrRight (BASE_FUNC+0x0400) // モータ右回転ルーチンのアドレス
#define AdrLeft (BASE_FUNC+0x0500) // モータ左回転ルーチンのアドレス
#define AdrTimer2 (BASE_FUNC+0x0B00) // 指定時間後にモータ停止のTimer2用アドレス
#define AdrBeep (BASE_FUNC+0x0D00) // ビープ音
typedef struct {
int cn6PWM; // 現在の左デューティ幅(コネクタから見て右のCN6コネクタ)
int cn7PWM; // 現在の右デューティ幅(コネクタから見て右のCN7コネクタ)
int time2Count;//Timer2割り込みでカウントアップ(下記stopCountまでカウント)
int stopCount; // time2CountがstopCount以上で、time2CountがをゼロにしてモータをOFF
} MortorCtrl;
#define MT ((MortorCtrl *)0xA0009000 ) // ram_area3領域の絶対アドレスで、グローバル変数を定義
__attribute__((address( 0x80005100 ))) void setPWM1 (void);
void setPWM1(void) // "R00800051000060"
{
MT->cn6PWM = MT->cn7PWM = 0xFFF; // 左右デューティ幅を設定
}
__attribute__((address( 0x80005200 ))) void setPWM2 (void);
void setPWM2(void) // "R0080005200005F"
{
MT->cn6PWM = MT->cn7PWM = 0x1FFF; // 左右デューティ幅を設定
}
__attribute__((address( 0x80005300 ))) void setPWM3 (void);
void setPWM3(void) // "R0080005300005E"
{
MT->cn6PWM = MT->cn7PWM = 0x38FF; // 左右デューティ幅を設定
}
__attribute__((address( 0x80005400 ))) void setPWM4 (void);
void setPWM4(void) // "R0080005400005D"
{
MT->cn6PWM = MT->cn7PWM = 0x4FFF; // 左右デューティ幅を設定
}
__attribute__((address( 0x80005500 ))) void setPWM5 (void);
void setPWM5(void) // "R0080005500005C"
{
MT->cn6PWM = MT->cn7PWM = 0x07FFF; // 左右デューティ幅を設定
}
__attribute__((address( 0x80005600 ))) void setPWM6 (void);
void setPWM6(void) // "R0080005600005B"
{
MT->cn6PWM = MT->cn7PWM = 0x0BFFF; // 左右デューティ幅を設定
}
__attribute__((address( 0x80005000 ))) void start (void);
void start()
{
( (void (*)(void) )AdrStart )();
setPWM6();//最大左右デューティ幅を設定
}
これをビルドして出来上がった.hexファイルより、次の「pwm_pi3ma_init.c.umh」を作ります。
Init S108000510000F8FFBD270400BEAF21F0A00300A0023C3D S1080005110000090433400A0023C00904234FF0F0424BB S108000512000040044AC0400428C000062AC21E8C003A5 S1080005130000400BE8F0800BD270800E00300000000BB S108000520000F8FFBD270400BEAF21F0A00300A0023C3C S1080005210000090433400A0023C00904234FF1F0424B9 S108000522000040044AC0400428C000062AC21E8C003A4 S1080005230000400BE8F0800BD270800E00300000000BA S108000530000F8FFBD270400BEAF21F0A00300A0023C3B S1080005310000090433400A0023C00904234FF380424C4 S108000532000040044AC0400428C000062AC21E8C003A3 S1080005330000400BE8F0800BD270800E00300000000B9 S108000540000F8FFBD270400BEAF21F0A00300A0023C3A S1080005410000090433400A0023C00904234FF4F0424B4 S108000542000040044AC0400428C000062AC21E8C003A2 S1080005430000400BE8F0800BD270800E00300000000B8 S108000550000F8FFBD270400BEAF21F0A00300A0023C39 S1080005510000090433400A0023C00904234FF7F0424B0 S108000552000040044AC0400428C000062AC21E8C003A1 S1080005530000400BE8F0800BD270800E00300000000B7 S108000560000F8FFBD270400BEAF21F0A00300A0023C38 S1080005610000090433400A0023C00904234FFBF0434A3 S108000562000040044AC0400428C000062AC21E8C003A0 S1080005630000400BE8F0800BD270800E00300000000B6 S108000500000E8FFBD271400BFAF1000BEAF21F0A00317 S108000501000029D023C1000423409F8400000000000EE S1080005020008015000C0000000021E8C0031400BF8FBB S1080005030001000BE8F1800BD270800E00300000000BE R00800050000061以上を「UMEHOSHI ITA」基板の初期起動として使います。 それには、raspiAPumeTest.pyの中の
| PWMの力の大きさ | エントリーポイント 実行コマンド | 逆転の 閾値角 | 正転回転の 閾値角 |
|---|---|---|---|
| 最大値setPWM6の(0x0BFFF) | R0080005600005B | target_angle-6.5度未満 | target_angle+6.5度より大きい |
| setPWM5の(0x07FFF) | R0080005500005C | target_angle-3.0度未満 | target_angle+3.0度より大きい |
| setPWM4の(0x4FFF) | R0080005400005D | target_angle-2.0度未満 | target_angle+2.0度より大きい |
| setPWM3の(0x38FF) | R0080005300005E | target_angle-1.5度未満 | target_angle+1.5度より大きい |
| setPWM2の(0x1FFF) | R0080005200005F | target_angle-1.0度未満 | target_angle+1.0度より大きい |
| 最小値setPWM1の(0x0FFF) | R00800051000060 | target_angle-0.5度未満 | target_angle+0.5度より大きい |
| モータ停止 | R009D020A00003E | 上記以外 | 上記以外 |
で示します。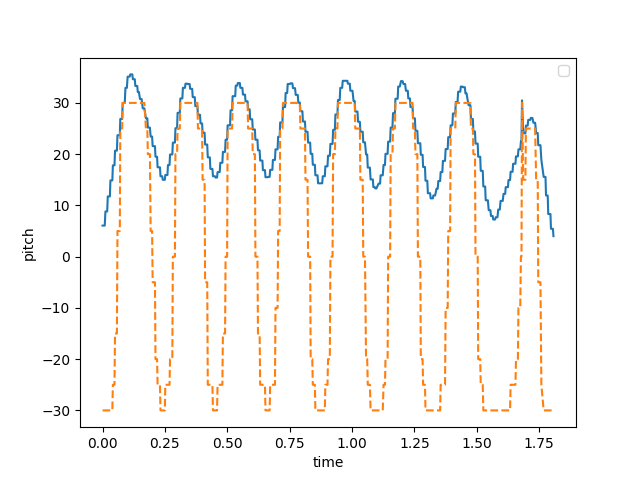 で示します。
で示します。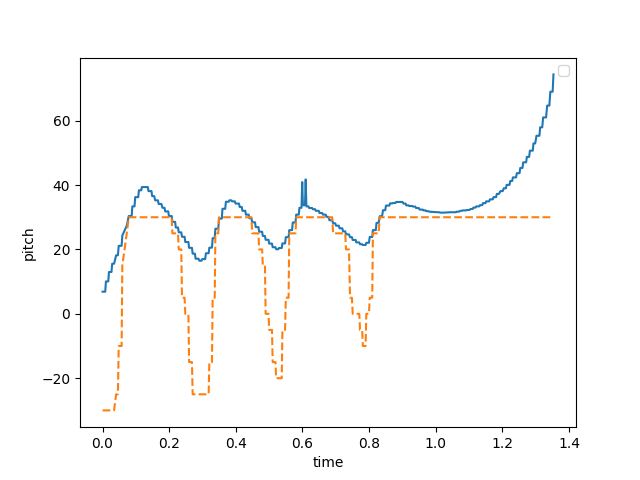
def save_results(results, last_str): # 結果保存用
with open('/usr/local/apps/log2.txt', 'w') as fw:
for t in results:
fw.write(f'{t[0]}:{t[1]} pitch:{t[2]} periodo:{t[3]}\n')
fw.write(last_str)
# # ピッチなどの計測と、その制御ループ----------------------------------------------------------
measure_loop_flag=True # ピッチなどの計測と、その制御ループを続けるためのフラグ
def measure_loop():
global measure_loop_flag # 測定監視ループフラグ
next_measure_time=0 # 測定間隔制御用(次の測定の時間を記憶する)
flag_push = False # 倒立制御開始ボタンが押されてから倒立制御を終えるまでTrue
flag_control = False # 倒立制御中である間だけTrue
start_control_time=0 # 制御開始の時間(秒)
start_forward_time = 0.05 # 制御開始前のモータ前進を行う期間(秒)
target_angle=22.5 # 目標角度 15→ 20→ 25← 23→ 23.5 22.5←
deadband = 0.5 # デッドバンド
time_now=0 # 現在の測定時間
motor_ctrl_time=0 # motor制御用コマンドをSUB送信した時の時間を記憶
results = [] # 制御履歴を残すリスト(制御終了時にファイル化)
pwmS=""
pwmS_bak=""
pwdN=0 # PWM デューティ比の大きさ(0~6)
pwdN_bak=6 # 上記の設定前の状態
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値setPWM6の(0x0BFFF)
#
while measure_loop_flag:
if GPIO.input(6) == GPIO.LOW: # SW2スイッチ(緑)が押された? リブート処理------------
measure_loop_flag=False
draw_text(f"Rebooting.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
try: # shell=False(デフォルト)で呼び出すのが安全
sock.close()
subprocess.run(["sudo", "reboot"], check=True)
except subprocess.CalledProcessError as e:
draw_text(f"Reboot fail.",0,showFlag = True, newImageFlag = True)
break
#
if GPIO.input(17) == GPIO.LOW: # SW4スイッチ(黒色)が押された? 制御終了-----------
flag_push = False
flag_control = False
save_results(results, "End SW\n") # 結果を保存
#
if flag_push==False and GPIO.input(16) == GPIO.LOW: # 制御開始用SW3スイッチ(黄色)が押された?
time.sleep(2)
results = []
start_control_time = time.time() # 制御スタート時間
flag_push = True
#
time_now=time.time()
if next_measure_time > time_now:
time.sleep(next_measure_time-time_now)
continue # 次の周期まで待つ
next_measure_time = time_now + 0.002 # 次の測定時間を更新
#
startM=time.time()
for ck in range(3):
heading, roll, pitch = read_euler() # ジャイロ測定測定
if pitch < 150: break
#
endM=time.time()
if flag_push == False : info_show2(pitch,target_angle) # 測定値の表示
#
if flag_push and flag_control == False: # 倒立制御に入る前の処理
if time.time() < start_control_time + start_forward_time:
umeusb.usb_send("R009D020200004D", quantity=0) # Forward 最初の助走
else:
umeusb.usb_send("R009D020300004C", quantity=0) # Back 最初の倒立のための逆転
if pitch > 5: # 倒立の回復可能限界角に達した?
flag_control = True
#
if flag_control :# 倒立振子制御中
pwdN=0
if pitch < target_angle-6.5 or pitch > target_angle+6.5:
pwdN=6
if pwdN!=pwdN_bak:
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値:setPWM6の(0x0BFFF)
elif pitch < target_angle-3.0 or pitch > target_angle+3.0:
pwdN=5
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005500005C", quantity=0) # setPWM5の(0x07FFF)
elif pitch < target_angle-2.0 or pitch > target_angle+2.0:
pwdN=4
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005400005D", quantity=0) # setPWM4の(0x4FFF)
elif pitch < target_angle-1.5 or pitch > target_angle+1.5:
pwdN=3
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005300005E", quantity=0) # setPWM3の(0x38FF)
elif pitch < target_angle-1.0 or pitch > pitch < target_angle+1.0:
pwdN=2
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005200005F", quantity=0) # setPWM2の(0x1FFF)
elif pitch < target_angle-0.5 or pitch > target_angle+0.5:
pwdN=1
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R00800051000060", quantity=0) # 最小:setPWM1の(0x0FFF)
pwdN_bak = pwdN
# モータの停止、逆転、正転
if pwdN == 0: # motor停止
pwmS=f'S{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
pwmS_bak = pwmS
motor_ctrl_time = startM
#
elif pitch <= target_angle: # 逆転
pwmS=f'B{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020300004C", quantity=0) # Back
pwmS_bak = pwmS
motor_ctrl_time = startM # モータ制御コマンドを送った時間をメモ
#
else: # (pitch > target_angle+deadband): #正転
pwmS=f'F{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020200004D", quantity=0) # Forward
pwmS_bak = pwmS
motor_ctrl_time = startM
#
#
results.append( (f'{pwmS}', startM, pitch, endM-startM) )
umeusb.usb.flush()
if pitch < 5 or pitch > 70 or startM > start_control_time + 3: #この時間で制御を終了
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
flag_push = False
flag_control = False
save_results(results, f"End pitch:{pitch} time:{startM-start_control_time}.\n") # 結果を保存
#
#
#
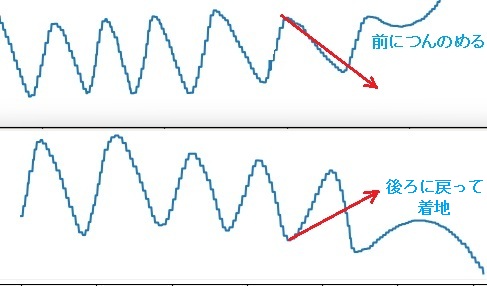
| 振動後の挙動状況 | 推測 | 対策 |
|---|---|---|
| 後進で戻って着地する状況 | 既に後進中にモータを逆転して効果が低くなっている | 目標角を上げる |
| 前につんのめっている状況 | 既に前進中にまータを前転して効果が低くなっている | 目標角を下げる |
# リングバッファを使った移動平均を求めて、目標角の補正値を求める機能のクラス
class Avg:
def __init__(self, size:int=5):
self.buff=[0] * size # 最新のsizeまでのデータを記憶するリングバッファとして使う配列
self.size=size # buff の配列のサイズ記憶
self.idx = 0 # buff の配列への記憶用操作添え字
self.count=0 # buff の配列に記憶している
self.total=0 # buff の配列に記憶しているデータの合計値
self.last_data=0 # 最後に記憶したデータ
self.dq = deque()
#
def add(self, data:float)->float :
if self.count < self.size:
self.buff[self.idx] = data
self.count +=1
else: #
self.total-=self.buff[self.idx]
self.buff[self.idx] = data
#
self.last_data = data
self.total += data
self.idx +=1
if self.idx == self.size: self.idx = 0
return self.total
#
def avg_value(self)->float : # バッファが一杯になった後、移動平均を求める
if self.count == 0: return 0
return self.total / self.count
#
def get_adjust_value(self): # 倒立目標角度の補正基準値取得 注意:内部処理はシーンケンス
if self.count < self.size: return 0
avgNow = self.avg_value()
self.dq.append(avgNow) # キューに記憶
if len(self.dq) < 10: return 0
avgBak = self.dq.popleft() # 前のデータ(キューからの取り出し)
THV=0.3
if avgNow - avgBak > THV: # 移動平均の変化の傾きがある程度プラスを超えるか?
return -1.5 # 1.0 は小さい、は大きい、
elif avgNow - avgBak < -THV:# 移動平均の変化の傾きがある程度マイナス以下?
return 1.5
else:
return 0
#
これを利用する
raspiAPumeTest.pyの
measure_loopに関する黄色の範囲は次の様になります。
def save_results(results, last_str): # 結果保存用
with open('/usr/local/apps/log2.txt', 'w') as fw:
for t in results:
fw.write(f'{t[0]}:{t[1]},pitch:{t[2]},periodo:{t[3]},avg:{t[4]},ajv:{t[5]}\n')
fw.write(last_str)
# # ピッチなどの計測と、その制御ループ----------------------------------------------------------
measure_loop_flag=True # ピッチなどの計測と、その制御ループを続けるためのフラグ
def measure_loop():
global measure_loop_flag # 測定監視ループフラグ
next_measure_time=0 # 測定間隔制御用(次の測定の時間を記憶する)
flag_push = False # 倒立制御開始ボタンが押されてから倒立制御を終えるまでTrue
flag_control = False # 倒立制御中である間だけTrue
start_control_time=0 # 制御開始の時間(秒)
start_forward_time = 0.05 # 制御開始前のモータ前進を行う期間(秒)
target_angle=23.5 # 目標角度 理想予測値
#target_angle = 22.4 # 実験用
target_angle = 22.5 # 実験用
target_angle = 23.0 # 実験用
target_angle = 23.5 # # 実験用
time_now=0 # 現在の測定時間
motor_ctrl_time=0 # motor制御用コマンドをSUB送信した時の時間を記憶
results = [] # 制御履歴を残すリスト(制御終了時にファイル化)
avg=None # 移動平均算出用
ajv=0 # target_angleに対する調整値
pwmS=""
pwmS_bak=""
pwdN=0 # PWM デューティ比の大きさ(0~6)
pwdN_bak=6 # 上記の設定前の状態
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値setPWM6の(0x0BFFF)
#
while measure_loop_flag:
if GPIO.input(6) == GPIO.LOW: # SW2スイッチ(緑)が押された? リブート処理------------
measure_loop_flag=False
draw_text(f"Rebooting.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
try: # shell=False(デフォルト)で呼び出すのが安全
sock.close()
subprocess.run(["sudo", "reboot"], check=True)
except subprocess.CalledProcessError as e:
draw_text(f"Reboot fail.",0,showFlag = True, newImageFlag = True)
break
#
if GPIO.input(17) == GPIO.LOW: # SW4スイッチ(黒色)が押された? 制御終了-----------
flag_push = False
flag_control = False
save_results(results, last_str="End SW\n") # 結果を保存
#
if flag_push==False and GPIO.input(16) == GPIO.LOW: # 制御開始用SW3スイッチ(黄色)が押された?
time.sleep(2)
results = []
avg=Avg(int(0.3/0.0015)) # 移動平均算出用
ajv=0 # target_angleに対する調整値
start_control_time = time.time() # 制御スタート時間
flag_push = True
#
time_now=time.time()
if next_measure_time > time_now:
time.sleep(next_measure_time-time_now)
continue # 次の周期まで待つ
next_measure_time = time_now + 0.002 # 次の測定時間を更新
#
startM=time.time()
for ck in range(3): # (雑音対策)
heading, roll, pitch = read_euler() # ジャイロ測定測定
if pitch < 150: break # 適正と予測される値?
#
endM=time.time()
if flag_push == False : info_show2(pitch,target_angle) # 測定値の表示
#
if flag_push and flag_control == False: # 倒立制御に入る前の処理
if time.time() < start_control_time + start_forward_time:
umeusb.usb_send("R009D020200004D", quantity=0) # Forward 最初の助走
else:
umeusb.usb_send("R009D020300004C", quantity=0) # Back 最初の倒立のための逆転
if pitch > target_angle+ajv-6.5: # 倒立角に達した?
flag_control = True
#
if flag_control :# 倒立振子制御中
avg.add(pitch) # 「リングバッファを使った移動平均」を求めるためのデータ記憶
ajv=avg.get_adjust_value()
pwdN=0
if pitch < target_angle+ajv-6.5 or pitch > target_angle+ajv+6.5:
pwdN=6
if pwdN!=pwdN_bak:
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値:setPWM6の(0x0BFFF)
elif pitch < target_angle+ajv-3.0 or pitch > target_angle+ajv+3.0:
pwdN=5
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005500005C", quantity=0) # setPWM5の(0x07FFF)
elif pitch < target_angle+ajv-2.0 or pitch > target_angle+ajv+2.0:
pwdN=4
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005400005D", quantity=0) # setPWM4の(0x4FFF)
elif pitch < target_angle+ajv-1.5 or pitch > target_angle+ajv+1.5:
pwdN=3
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005300005E", quantity=0) # setPWM3の(0x38FF)
elif pitch < target_angle+ajv-1.0 or pitch > pitch < target_angle+ajv+1.0:
pwdN=2
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005200005F", quantity=0) # setPWM2の(0x1FFF)
elif pitch < target_angle+ajv-0.5 or pitch > target_angle+ajv+0.5:
pwdN=1
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R00800051000060", quantity=0) # 最小:setPWM1の(0x0FFF)
pwdN_bak = pwdN
# モータの停止、逆転、正転
if pwdN == 0: # motor停止
pwmS=f'S{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
pwmS_bak = pwmS
motor_ctrl_time = startM
#
elif pitch <= target_angle+ajv: # 逆転
pwmS=f'B{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020300004C", quantity=0) # Back
pwmS_bak = pwmS
motor_ctrl_time = startM # モータ制御コマンドを送った時間をメモ
#
else: # (pitch > target_angle+ajv): #正転
pwmS=f'F{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020200004D", quantity=0) # Forward
pwmS_bak = pwmS
motor_ctrl_time = startM
#
#
results.append( ( f'{pwmS}', startM, pitch, endM-startM, avg.avg_value(), ajv*10 ) ) # ファイル化情報
umeusb.usb.flush()
if pitch < 5 or pitch > 70 or startM > start_control_time + 10: #この時間で制御を終了
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
flag_push = False
flag_control = False
save_results(results, last_str=f"End pitch:{pitch} time:{startM-start_control_time}.\n") # 結果を保存
#
#
#
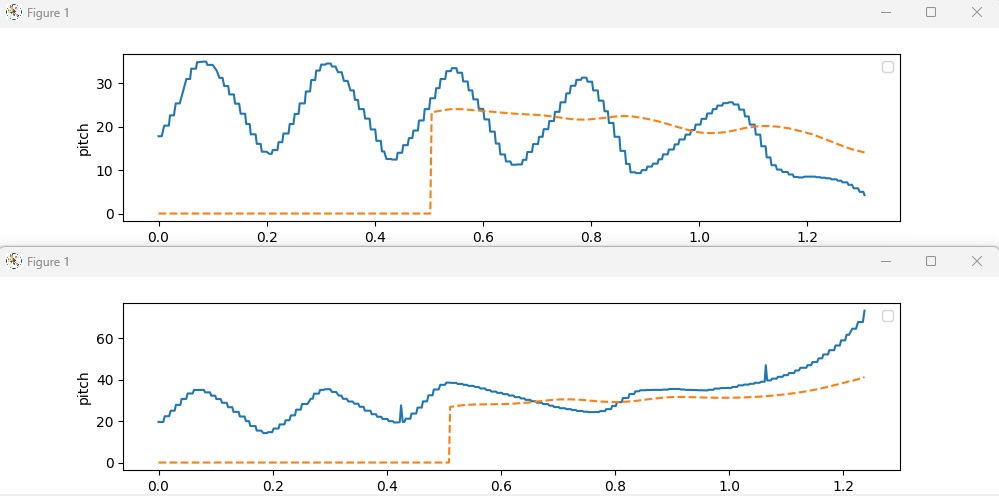
以上のコードで
実行した時の上記目標補正とモータ制御の様子を。以下にグラフ化しました。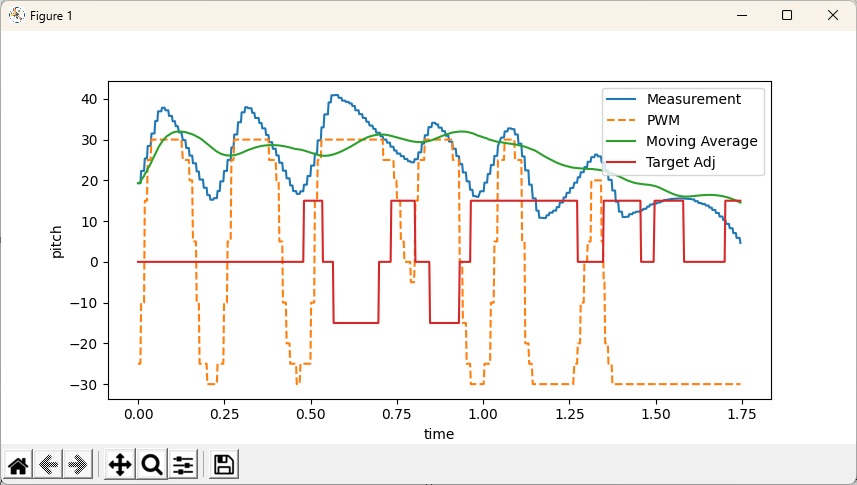
# log2.txt.py
import matplotlib.pyplot as plt
tims=[] # 測定時間
pitchs=[] # 上記規則時のロボット角度
pwms=[] # 上記規則時のモータモータ制御に使ったPWMの大きさ(正転、逆転、停止)
avgs=[] # 移動平均
ajvs=[] # 目標補正
fr = open('log2.txt', 'r')
line = fr.readline()
timing=0
start_time = 0
n=0
while line != '':
n+=1
i=line.find(" ")
if line.startswith('B') or line.startswith('F') or line.startswith('S'):
items=line.split(',')
pwm_t=items[0] # 例 'B5:1772586570.933309'
flag=pwm_t[0]
pwm=int(pwm_t[1:2])
if flag == 'S': pwm = 0
elif flag == 'B': pwm = -pwm
pwms.append(pwm * 5) # 逆転設定のPWNの表示用相対値
timing = float(pwm_t[3:])
if start_time == 0: start_time = timing
period_p = float(pwm_t[3:])-timing # 処理周期
tim=timing-start_time
tims.append(tim) # 経過時間
#
pitch_s = items[1]
pitch=float(pitch_s[len('pitch:'):])
pitchs.append(pitch)
#
period_s = items[2]
period_m=float(period_s[len('periodo:'):]) # 計測時間
#
avg_s = items[3]
avg=float(avg_s[len('avg:'):]) # 移動平均
avgs.append(avg)
#
ajv_s = items[4]
ajv=float(ajv_s[len('ajv:'):]) # 目標補正
ajvs.append(ajv)
#
print(f"{flag}{pwm:5},{tim:9.5f}---{pitch:9.5f}----{timing:15.5f} 計測時間:{period_m:9.5f}")
#if n > 285:break
#
line = fr.readline() # 次の行の読み込み
fr.close()
fig = plt.figure() # ◎ファイル保存の準備
# plt.plot(tims,pitchs,'x')
# plt.plot(tims,pwms, 'o', linestyle="--")
plt.plot(tims, pitchs, label="Measurement") # 測定角度
plt.plot(tims, pwms, linestyle="--", label="PWM") # PWMの様子
plt.plot(tims, avgs, label="Moving Average") # 移動平均
plt.plot(tims, ajvs, label="Target Adj") # 目標補正
plt.xlabel("time")
plt.ylabel("pitch")
plt.title("")
plt.legend() # グラフ内にも上記のlabel表示をつける
# plt.grid() # グリッドの表示
fig.savefig("img.png")# ◎表示イメージのファイル保存
plt.show() #画面に表示して閉じるまで待つ
#!/usr/bin/python3
# -*- coding: utf-8 -*-
# TCPサーバープログラム(/usr/local/apps/raspiAPumeTest.py)
# [Raspberry Pi 3 Model A+]と[UMEHOSHI ITA]を乗せたモータ付き台車のサービスから呼び出される
# 倒立振子を試すコード
import subprocess
from collections import deque
import os # ファイル有無を調べるため追加 ★
def exists(path):
try:
os.stat(path)
return True
except (OSError, AttributeError):
# ファイルが存在しない、またはos.statが使えない場合にFalseを返す
return False
# 前か後かの移動中を判断を、波の勾配(微分値)を使って判断すし、目標角の補正値を取得するクラス
from collections import deque
class Detector:
def __init__(self, size: int = 6):
self.dq_former = deque()# 前半の値を保持する変数(データはこちらからを入れる。注意:最新情報はこちら)
self.dq_latter = deque()# 後半の値を保持する変数(注意:キューなのでこちらが時間的に前になる)
self.size = size
# 前半と後半の合計値を保持する変数
self.sum_former = 0.0 # 「差分更新(スライディング・ウィンドウ)」という手法を使う
self.sum_latter = 0.0
self.prev_valley = 0 # 前の谷の値
self.rtnVal = 0
self.call_count = 0
def append(self, data: float) -> float:
self.dq_former.append(data) # 新しいデータを追加
self.sum_former += data
if len(self.dq_former) <= self.size:
return 0,0
# 以下は前半のキューが一杯になった後の追加処理
removed = self.dq_former.popleft() # 前半」の先頭の追い出し
self.sum_former -= removed
self.dq_latter.append(removed) # データを後半に移動
self.sum_latter += data
# 後半キューが一杯になるまでの処理
if len(self.dq_latter) <= self.size:
return 0,0
# 以下は前半と後半が一杯になった。
removed = self.dq_latter.popleft() # 前半」の先頭の追い出し
self.sum_latter -= removed
#
tilt_former = self.dq_former[-1]-self.dq_former[0] # 最近の傾き
tilt_latter = self.dq_latter[-1]-self.dq_latter[0] # 直前の傾き
self.call_count += 1
peak_flag = tilt_latter > 0 and tilt_former < 0 # 山の頂点
valley_flag = tilt_latter < 0 and tilt_former > 0 # 谷の頂点
if not( peak_flag or valley_flag ) or self.call_count < 20:
return self.rtnVal,tilt_former # 変曲点でない
#
dif_sum = abs(self.sum_former) - abs(self.sum_latter) # # 変曲点の前と後の傾きの差を取得
if abs(self.prev_valley-data) > 20: # 差が大きすぎる場合は雑音とsて無視
return self.rtnVal,tilt_former
#
if peak_flag : # -------------------上に山の変曲点
if abs(tilt_former) < 1.5 :# 傾きが小さくなった
self.rtnVal = -2.01
elif abs(tilt_former) < 1.5 + 0.5:
self.rtnVal = -1.01
else:
self.rtnVal = -0.01
elif valley_flag : # -------------------下に谷の変曲点]
if self.prev_valley != 0 and data>self.prev_valley+2: # 変曲点が以前が上がっている?
self.rtnVal = -2.01
elif abs(tilt_former) < 1.8:
self.rtnVal = 2.51
elif abs(tilt_former) < 1.8 + 0.9:
self.rtnVal = 1.51
else:
self.rtnVal = 0.01
self.prev_valley = data # 谷の貯点を記憶
self.call_count = 0
return self.rtnVal,tilt_former
#
def sum_tilt_former(self):
return self.dq_former[-1]-self.dq_former[0] # 最近の傾き
# ---- LED用の出力とタクトスイッチ用入力 のためのGPIO初期化-----
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(21, GPIO.OUT) # GPIO21を出力に設定
GPIO.output(21, GPIO.HIGH) # ON(3.3V)
for no in [6, 16, 17]:
GPIO.setup(no, GPIO.IN, pull_up_down=GPIO.PUD_UP) # プルアップ付き入力
#------ GPIO初期化 終了 -------------------------------------
import signal # システムが閉じることを判断するため追加 ★
import board
import busio
from adafruit_ssd1306 import SSD1306_I2C # SSD1306ディスプレイ用
import adafruit_vl53l1x # VL53L1X使用 レーザー測距センサーモジュール用
# オープンソースハードウェアの設計・製造・販売を行うアメリカの企業のAdafruit(エイダフルート)モジュール利用
from PIL import Image, ImageDraw, ImageFont
import time
i2c = busio.I2C(board.SCL, board.SDA)# --- I2C初期化 ---
# --- SSD1306ディスプレイ初期化 (128x64の場合) -----------
oled = SSD1306_I2C(128, 64, i2c)
oled.contrast(128) # 0?255
oled.fill(0) # --- クリア
oled.show() # ---表示
# --- Pillowで描画領域を作成 ---
image = Image.new("1", (oled.width, oled.height))
draw = ImageDraw.Draw(image)
font = ImageFont.load_default()# --- フォント設定 ---
def draw_text(txt: str, row=0, showFlag = True, newImageFlag = False, font=font, fill=255):
global image,draw
if newImageFlag:
image = Image.new("1", (oled.width, oled.height)) # イメージ作り直し(全体クリア)
draw = ImageDraw.Draw(image)
# --- テキスト描画 (0=黒、255=白)上記設定で、横21文字---
draw.text((0, row*15), txt , font=font, fill=255)
# --- 画面に表示 ---
oled.image(image)
if showFlag: oled.show()
draw_text(f"UMEHOSHI ITA",0)
# 9軸センサー BNO055 制御 ---------------------------------------------------
import smbus # I2C通信をPythonから簡単に扱うためのモジュール
import os
# BNO055 の初期化
BNO055_ADDRESS = 0x28 # BNO055のI2Cアドレス(ADRピンがGNDなら0x28、VDDなら0x29になります)
BNO055_OPR_MODE = 0x3D # 動作モードを設定するためのレジスタ
BNO055_EULER_H_LSB = 0x1A # オイラー角(方位・ロール・ピッチ)のデータが始まるアドレス
bus = smbus.SMBus(1)# 引数の1でRaspberry PiのボードGPIO2: SDA、GPIO3: SCLを指定
bno055_calib_bin_path="/usr/local/apps/bno055_calib.bin" # キャリブレーションデータファイルパス
# このキャリブレーションデータファイルが存在しなければ、作成する。
try:
os.stat(bno055_calib_bin_path) # ファイルが存在しない場合は、エラー
except OSError:
bus.write_byte_data(BNO055_ADDRESS, BNO055_OPR_MODE, 0x00) # 設定変更(OPR_MODE)でCONFIGモードに切り替える
time.sleep(0.05)
# センサーをリセット(0x3FのSYS_TRIGGERレジスタのビット7をセット)
bus.write_byte_data(BNO055_ADDRESS,0x3F, 0x20)
time.sleep(0.7) # リセット後は再起動まで時間がかかる
# 出力単位(UNIT_SEL)を設定(0x00で「角度=度(°)」単位)
bus.write_byte_data(BNO055_ADDRESS,0x3B, 0x00)
# センサーフュージョンを有効にするNDOFモードに変更
bus.write_byte_data(BNO055_ADDRESS,BNO055_OPR_MODE, 0x0C) # NDOFモードへ
time.sleep(0.05)
while True: # NDOFモードで全てのセンサー(SYS, GYR, ACC, MAG)が 3 になるまで動かす。
cal = bus.read_byte_data(BNO055_ADDRESS, 0x35)
sys = (cal >> 6) & 0x03
gyr = (cal >> 4) & 0x03
acc = (cal >> 2) & 0x03
mag = (cal >> 0) & 0x03
draw_text(f"bno055 NDOF Calibrating...",0, showFlag = False,newImageFlag = True) # キャリブレーションの開始
draw_text(f"SYS:{sys}, GYR:{gyr}, ACC:{acc}, MAG:{mag}", 1)
time.sleep(0.5)
if sys == 3 and gyr == 3 and acc == 3 and mag == 3 : break # キャリブレーション完了?
# 各値が 3 になれば完全キャリブレーション完了です
#
calib_data = bus.read_i2c_block_data(BNO055_ADDRESS, 0x55, 22)
with open(bno055_calib_bin_path, "wb") as f:
f.write(bytearray(calib_data)) # オフセット値を読み出して保存
#
draw_text(f"End Calibration",2) # キャリブレーションデータファイル作成終了
# オフセット調整(センサーの取り付け位置や方向を自動補正)
bno055_offset_path="/usr/local/apps/bno055_offset.txt"
# 上記ファイル内に X軸が北を向く時にHeading、水平に置いた時にRollと Pitchが記憶される
make_offset_mode=False # "bno055_offset.txt"オフセット調整ファイル作成モード
try:
with open(bno055_offset_path, "r") as fr:
s = fr.readline() # 一行読み取り(改行を含めて)
draw_text(f"bno055 offset setting",0,newImageFlag = True)
a = s.split(",")
heading_offset = float(a[0]) # オフセット調整値取得
roll_offset = float(a[1])
pitch_offset = float(a[2])
print(f"offset value heading:{heading_offset}, roll:{roll_offset}, pitch:{pitch_offset}")
except:
make_offset_mode = True # bno055_offset.txtのオフセット調整作成モード
bus.write_byte_data(BNO055_ADDRESS, BNO055_OPR_MODE, 0x00) # 設定変更(OPR_MODE)でCONFIGモードに切り替える
time.sleep(0.05)
with open(bno055_calib_bin_path, "rb") as f:
calib_data = list(f.read(22)) # 別途bno055_calib_write.pyで行ったキャリブレーションの記憶ファイルを読む
# 設定モードへ
bus.write_byte_data(BNO055_ADDRESS, 0x3D, 0x00)
time.sleep(0.025)
# キャリブレーションデータを書き込んで、調整情報を復元
bus.write_i2c_block_data(BNO055_ADDRESS, 0x55, calib_data)
# NDOFモードに戻す
bus.write_byte_data(BNO055_ADDRESS, 0x3D, 0x0C)
time.sleep(0.05)
# 出力単位(UNIT_SEL)を設定(0x00で「角度=度(°)」単位)
bus.write_byte_data(BNO055_ADDRESS,0x3B, 0x00)
def to_signed(val):
"""16ビット値を符号付き整数に変換"""
if val >= 0x8000:
val -= 0x10000
return val
prev1_Pitch = 0 # 前のPitchの測定値
prev2_Pitch = 0 # 前のPitchの測定値
prev3_Pitch = 0 # 前のPitchの測定値
def read_euler():
''' make_offset_modeがTrueの場合は、現在の
heading:左右への向き, roll:左右の傾き, pitch:上下の傾きを返す。
make_offset_modeがFalseの場合は、調整過程のheading, roll, pitchを返す'''
#
global prev1_Pitch,prev2_Pitch,prev3_Pitch # 前のPitchの測定値
data = bus.read_i2c_block_data(BNO055_ADDRESS, BNO055_EULER_H_LSB, 6)
# 各要素が 1 バイト(0~255)の整数を6個のリストで得られる。(1 LSB = 1/16 度)
# データはリトルエンディアン形式(下位→上位の順)
heading = (data[1] << 8) | data[0] # 方位角(北基準のYAW)
roll = (data[3] << 8) | data[2] # ロール角(左右の傾き)
pitch = (data[5] << 8) | data[4] # ピッチ角(前後の傾き)
# ロールとピッチは符号付き
roll = to_signed(roll) # 16ビット値を符号付き整数に変換
pitch = to_signed(pitch) # 16ビット値を符号付き整数に変換
# スケーリング(1 LSB = 1/16 度)
heading = heading / 16.0 #
roll = roll / 16.0
pitch = pitch / 16.0
if make_offset_mode == False: #オフセット調整処理
# X軸が北を向く時にHeadingが0、水平に置いた時にRollと Pitchが0になるオフセット調整
heading = heading - heading_offset # headingズレ補正
heading = heading if heading >= 0 else heading + 360
roll = roll - roll_offset # rollズレ補正
if roll > 90:
roll = -(90 - roll)
elif roll < -90:
roll = -(-90 - roll)
pitch = pitch - pitch_offset # pitchズレ補正
if pitch > 180:
pitch = -(360 - pitch)
elif pitch < -180:
pitch = -(-360 - pitch)
#
prev3_Pitch = prev2_Pitch # 前の測定値記憶
prev2_Pitch = prev1_Pitch # 前の測定値記憶
prev1_Pitch = pitch # 前の測定値記憶
return heading, roll, pitch # 左右への向き, 左右の傾き, 上下の傾きを返す
if make_offset_mode: #オフセット調整処理
count = 100 # ロボットを水平にしてはX軸が北を向いてから安定に必要な予想回数
while True:
h, r, p = read_euler()
print(f"Heading: {h:7.2f}, Roll: {r:7.2f}, Pitch: {p:7.2f}")
count -= 1
print(f" {count}が0になるまでに、ロボットを水平にしてはX軸が北を向くように置いてください。")
draw_text(f"Before CountReaches 0",0,showFlag = False, newImageFlag = True)
draw_text(f"Place it horizontally",1,showFlag = False)
draw_text(f" and point it north",2,showFlag = False)
draw_text(f" count:{count}",3)
time.sleep(0.2)
if count <= 0:
with open(bno055_offset_path, "w") as fw:
fw.write(f"{h},{r},{p}\n") # オフセット調整データ書き込み
heading_offset, roll_offset,pitch_offset=h,r,p
break # 上記でX軸が北を向く時にHeading、水平に置いた時にRollと Pitchを記憶
# --------------------------------------------------------------------------------
vl53 = adafruit_vl53l1x.VL53L1X(i2c)# VL53L1X使用 レーザー測距センサーモジュール初期化
print("VL53L1X Start measuring...")
vl53.start_ranging()
distance = vl53.distance
time.sleep(0.5)
print(f"Distance: {distance} mm")
# umetcp umeusb 通信関連----------------------------------------------------
import os
import umetcp
from umetcp import send_message, receiveData
import socket
import umeusb
import traceback
sock = None # クライアントと通信するソケット
def my_tcp_receive_file_func(filepath):
''' 受信したumehoshiアプリ用「.umh」のファイルより、
「UME専用Hexコマンド」の文字列をusbへ出力する'''
name,ext = os.path.splitext(filepath)
if not ext == ".umh" : return
with open( filepath ) as f: ss=f.readlines()
ss="".join(ss[1:])
print(ss)
umeusb.send_cmd(ss, quantity=0) # TCPで受信した 「.umh」データを[UMEHOSHI ITA]へ送る
umetcp.tcp_receive_file_func = my_tcp_receive_file_func # tcpファイル受信データの処理を置き換え
def my_tcp_recieve_message(msg):
if msg.startswith("G:"):
file_path = msg[2:]
if exists(file_path):
umetcp.send_file(sock, file_path)
else:send_message(sock, f"G:{file_path}Not Operation\n")
else: umeusb.send_cmd(msg)
umetcp.tcp_receive_message_func=my_tcp_recieve_message # TCO受信文字列(UME専用Hexコマンド)処理を置き換え
def my_usb_receive_func(bin):
'usb受信のイベントで実行するデフォルト処理'
global sock
#print("-----------",bin)
ss = bin.decode('utf-8')
a=ss.split('\n')
for s in a:
s = s.strip()
if s == "": continue
if sock != None:
print(f"USB receive:{s}")
send_message(sock, s) # [UMEHOSHI ITA]からの応答メッセージをTCPで返す
else: print( f"USB receive:{s}" )
umeusb.usb_receive_func = my_usb_receive_func # USB受信データの処理を置き換える。
umeusb.init_sub()
import threading
t_id = threading.Thread(target=umeusb.read_loop)
t_id.start()
#ip="192.168.4.1"
ip=umetcp.get_wlan0_ip() # IPアドレス取得
while ip == None:
ip=umetcp.get_wlan0_ip()
if ip : break
time.sleep(0.1)
#umeusb.send_cmdfile("/usr/local/apps/uStartInit.umh") # ロボット初期化("R009D020010004E")
umeusb.send_cmdfile("/usr/local/apps/pwm_pi3ma_init.c.umh") # ロボット初期化
server_addr =(umetcp.get_wlan0_ip(), 59154)
hostname=socket.gethostname()
print("Serverの情報:",hostname, server_addr)
def info_show2( pitch , target_angle):
''' IPアドレスpとポート番号の情報と、ピッチ角度、目標角度をSSD1306ディスプレイに表示する'''
draw_text(f"{server_addr[0]},{server_addr[1]}",0,showFlag = False, newImageFlag = True)
draw_text(f"Pitch:{pitch:5.1f} {target_angle}",2,showFlag = True)
def save_results(results, last_str): # 結果保存用
with open('/usr/local/apps/log2.txt', 'w') as fw:
for t in results:
fw.write(f'{t[0]}:{t[1]},pitch:{t[2]},periodo:{t[3]},tilt:{t[4]},ajv:{t[5]}\n')
fw.write(last_str)
# # ピッチなどの計測と、その制御ループ----------------------------------------------------------
measure_loop_flag=True # ピッチなどの計測と、その制御ループを続けるためのフラグ
def measure_loop():
global measure_loop_flag # 測定監視ループフラグ
next_measure_time=0 # 測定間隔制御用(次の測定の時間を記憶する)
flag_push = False # 倒立制御開始ボタンが押されてから倒立制御を終えるまでTrue
flag_control = False # 倒立制御中である間だけTrue
start_control_time=0 # 制御開始の時間(秒)
start_forward_time = 0.05 # 制御開始前のモータ前進を行う期間(秒)
target_angle=23.5 # 目標角度 理想予測値
# target_angle = 22.4 # 実験用
# target_angle = 22.5 # 実験用
# target_angle = 23.0 # 実験用
# target_angle = 23.5 # 実験用
time_now=0 # 現在の測定時間
motor_ctrl_time=0 # motor制御用コマンドをSUB送信した時の時間を記憶
results = [] # 制御履歴を残すリスト(制御終了時にファイル化)
detector=None # 変更点判定
ajv=0 # target_angleに対する調整値
pwmS=""
pwmS_bak=""
pwdN=0 # PWM デューティ比の大きさ(0~6)
pwdN_bak=6 # 上記の設定前の状態
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値setPWM6の(0x0BFFF)
#
while measure_loop_flag:
if GPIO.input(6) == GPIO.LOW: # SW2スイッチ(緑)が押された? リブート処理------------
measure_loop_flag=False
draw_text(f"Rebooting.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
try: # shell=False(デフォルト)で呼び出すのが安全
sock.close()
subprocess.run(["sudo", "reboot"], check=True)
except subprocess.CalledProcessError as e:
draw_text(f"Reboot fail.",0,showFlag = True, newImageFlag = True)
break
#
if GPIO.input(17) == GPIO.LOW: # SW4スイッチ(黒色)が押された? 制御終了-----------
flag_push = False
flag_control = False
save_results(results, last_str="End SW\n") # 結果を保存
#
if flag_push==False and GPIO.input(16) == GPIO.LOW: # 制御開始用SW3スイッチ(黄色)が押された?
time.sleep(2)
results = []
detector=Detector(size=6) # 判定器
ajv=0 # target_angleに対する調整値
pwmS_bak=''
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値:setPWM6の(0x0BFFF)
pwdN_bak=6
#umeusb.usb_send("R0080005500005C", quantity=0) # setPWM5の(0x07FFF)
#pwdN_bak=5
start_control_time = time.time() # 制御スタート時間
flag_push = True
umeusb.usb_send("R009D020200004D", quantity=0) # Forward 最初の助走
#
time_now=time.time()
if next_measure_time > time_now:
time.sleep(next_measure_time-time_now)
continue # 次の周期まで待つ
next_measure_time = time_now + 0.002 # 次の測定時間を更新
#
startM=time.time()
for ck in range(3): # # ジャイロ測定処理(雑音対策の繰り返し)
heading, roll, pitch = read_euler() # ーーージャイロ測定ーーー
if pitch < 150: break # 適正と予測される値?
#
endM=time.time()
if flag_push == False : info_show2(pitch,target_angle) # 測定値の表示
#
if flag_push and flag_control == False: # 倒立制御に入るまでの処理
if time.time() > start_control_time + start_forward_time:
umeusb.usb_send("R009D020300004C", quantity=0) # Back 最初の倒立のための逆転
if pitch > target_angle+ajv-6.5: # 倒立角に達した?
flag_control = True
#
if flag_control :# 倒立振子制御中
ajv,tilt_former=detector.append(pitch) # 変曲点を求めるためのデータ記憶
pwdN=0
if pitch < target_angle+ajv-6.5 or pitch > target_angle+ajv+6.5:
pwdN=6
if pwdN!=pwdN_bak:
umeusb.usb_send("R0080005600005B", quantity=0) # 最大値:setPWM6の(0x0BFFF)
elif pitch < target_angle+ajv-3.0 or pitch > target_angle+ajv+3.0:
pwdN=5
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005500005C", quantity=0) # setPWM5の(0x07FFF)
elif pitch < target_angle+ajv-2.0 or pitch > target_angle+ajv+2.0:
pwdN=4
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005400005D", quantity=0) # setPWM4の(0x4FFF)
elif pitch < target_angle+ajv-1.5 or pitch > target_angle+ajv+1.5:
pwdN=3
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005300005E", quantity=0) # setPWM3の(0x38FF)
elif pitch < target_angle+ajv-1.0 or pitch > pitch < target_angle+ajv+1.0:
pwdN=2
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R0080005200005F", quantity=0) # setPWM2の(0x1FFF)
elif pitch < target_angle+ajv-0.5 or pitch > target_angle+ajv+0.5:
pwdN=1
if pwdN!=pwdN_bak: # USB送信量を抑える工夫
umeusb.usb_send("R00800051000060", quantity=0) # 最小:setPWM1の(0x0FFF)
pwdN_bak = pwdN
# モータの停止、逆転、正転
if pwdN == 0: # motor停止
pwmS=f'S{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
pwmS_bak = pwmS
motor_ctrl_time = startM
#
elif pitch <= target_angle+ajv: # 逆転
pwmS=f'B{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020300004C", quantity=0) # Back
pwmS_bak = pwmS
motor_ctrl_time = startM # モータ制御コマンドを送った時間をメモ
#
else: # (pitch > target_angle+ajv): #正転
pwmS=f'F{pwdN}'
if startM-motor_ctrl_time>0.01 or pwmS != pwmS_bak: # USB送信量を抑える工夫
umeusb.usb_send("R009D020200004D", quantity=0) # Forward
pwmS_bak = pwmS
motor_ctrl_time = startM
#
#
results.append( ( f'{pwmS}', startM, pitch, endM-startM, tilt_former, ajv ) ) # ファイル化情報
umeusb.usb.flush()
if pitch < 5 or pitch > 70 or startM > start_control_time + 10: #この時間で制御を終了
umeusb.usb_send("R009D020A00003E", quantity=0) # STOP
flag_push = False
flag_control = False
save_results(results, last_str=f"End pitch:{pitch} time:{startM-start_control_time}.\n") # 結果を保存
#
#
#
#info_show() # ディスプレイへ表示
t_id2 = threading.Thread(target=measure_loop)
t_id2.start()
# 終了時に実行したい処理 ★
def handle_shutdown(signum, frame):
global measure_loop_flag
if measure_loop_flag == False: return
print(f"シャットダウンを検知しました (Signal: {signum})")
measure_loop_flag = False
draw_text(f"Wait....",0,showFlag = True, newImageFlag = True)
time.sleep(10)
draw_text(f"Shutdown.",0,showFlag = True, newImageFlag = True)
time.sleep(0.01)
# SIGTERM(システム終了時の標準信号)を登録 ★
signal.signal(signal.SIGTERM, handle_shutdown) # ★
# TCPサーバー起動処理
try:
serversock = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
serversock.bind(server_addr) # IPとポート番号を指定します
print(f"{server_addr}:接続要求を待つ")
serversock.listen()
except : serversock = None
while serversock != None:
print("接続を待って、接続してきたら許可")
sock, address = serversock.accept()#サーバの接続受け入れ
print("接続相手:",address)
try:
receiveData( sock ) # 受信ループ
except Exception as e:
print(f"例外の種類: {type(e)}")
print(f"スタックトレース: {traceback.format_exc()}")
draw_text(f"wait next",0,showFlag = True, newImageFlag = True)
sock.close()
で示します。